简易四足步行结构
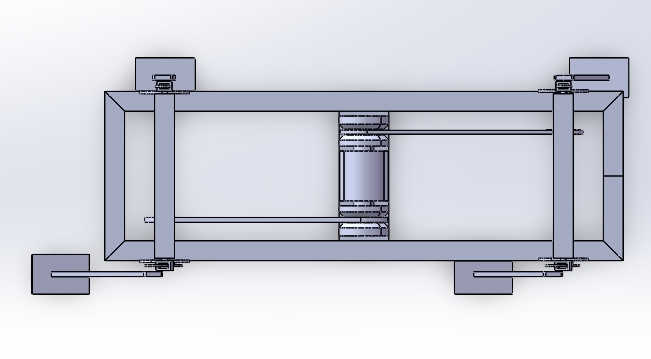

简易四足步行结构通常指的是四足步行机器人的基本结构设计,这种设计旨在实现机器人的基本行走功能。 四足机器人要不断借助学习算法积累行走经验,适应不同的地面环境和工作条件。 简易四足步行结构的设计通常会简化上述某些部分,以实现基本的行走功能。例如,可以使用简单的电机驱动腿部关节,减少传感器的数量,简化控制算法等。这样的设计可以降低机器人的复杂性和成本,适用于教学、实验等场景。
标签:


- 模型大小 :4MB
- 消 耗 :300莫西点
- 下载次数 :
- 包含文件 :