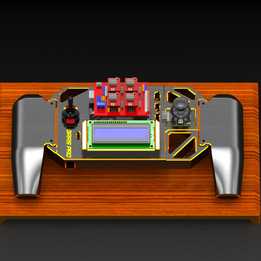
3 自由度球平衡机器人


这是一个3自由度RRS并联机械手的模型,或者更简单地说,一个球平衡机器人。它配备了一个触摸屏来追踪球的位置,利用逆运动学计算所需的步进电机位置,以及两个PID控制器来控制X轴和Y轴的位移归零。因此,该机器人能够将球置于用户定义的任意位置,甚至可以为球创建数学路径,例如椭圆!这个机器人是我自己设计、建模并3D打印的,如果您对设计选择或打印过程有任何疑问,请告诉我 :)
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,Snagit