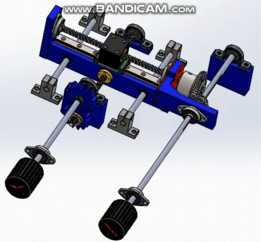
人形双腿机构
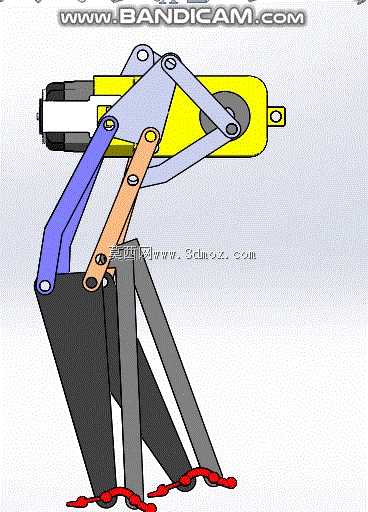

这是一个完全模拟的人形双足机构,在 SolidWorks 中设计,并由电机驱动。该设计通过优化的关节约束和平衡性确保了运动的流畅性。它具有动态步行机制,非常适合机器人应用及进一步开发。SolidWorks 仿真验证了其高效的运动,为双足机器人系统相关人员提供了宝贵的参考。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Snagit,Rendering