3 DoF 移动机器人


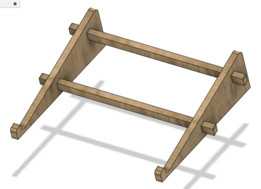
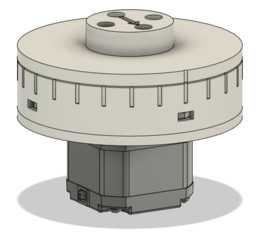
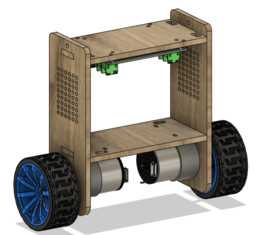
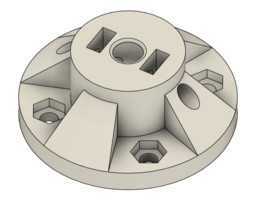
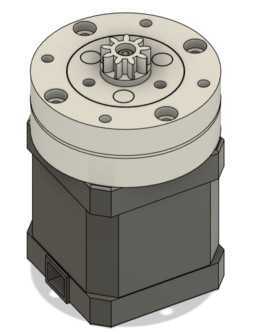
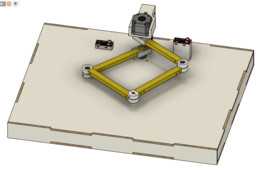
这款机器人是全向型,使用全向轮。它可以向任何方向移动,使其在狭小空间内具有高度机动性。这种机器人的三个轮子只有三个自由度,这有助于通过最大限度地减少所需的电机轮组数量来降低成本。在这个项目中,我使用了我3D打印的68毫米全向轮,就像之前的帖子中提到的那样。68毫米全向轮的3D文件可以在我的页面上找到――欢迎随时查看!感谢您的关注。点赞并关注,以便及时了解未来的项目动态。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :AutoCAD,Rendering,STEP / IGES,STL