Ballbot 版本 1
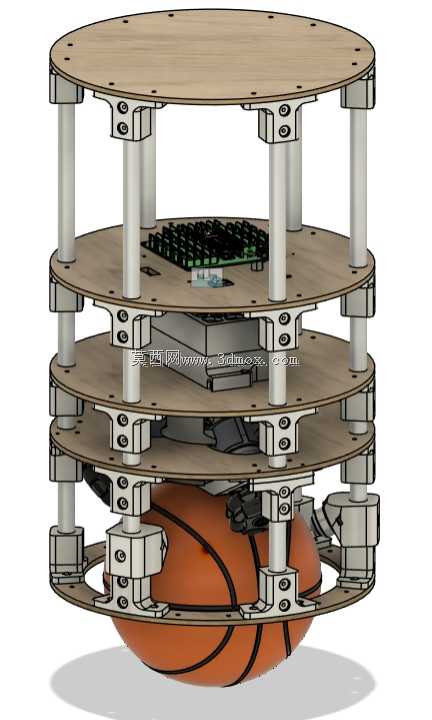
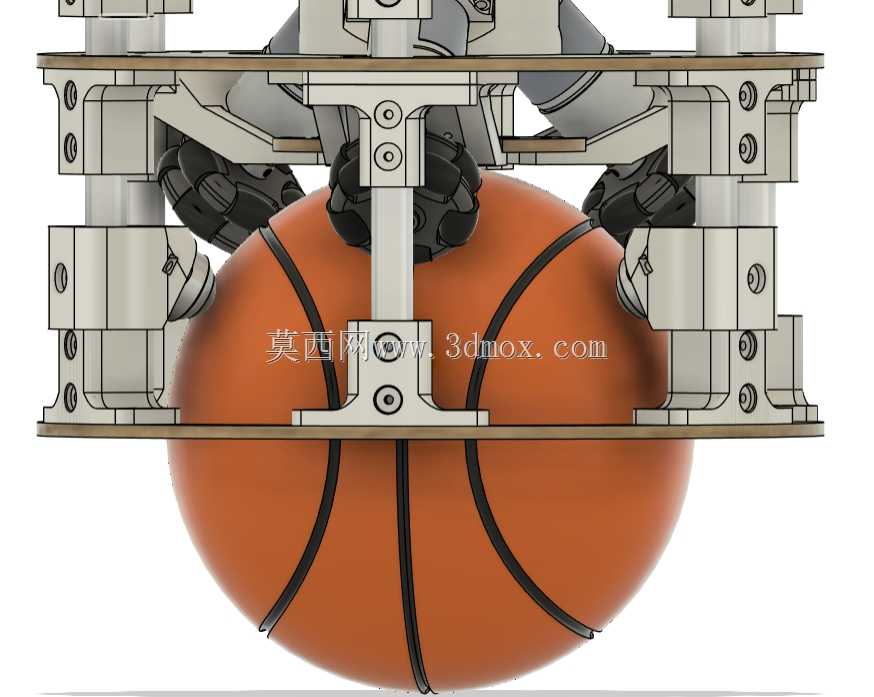
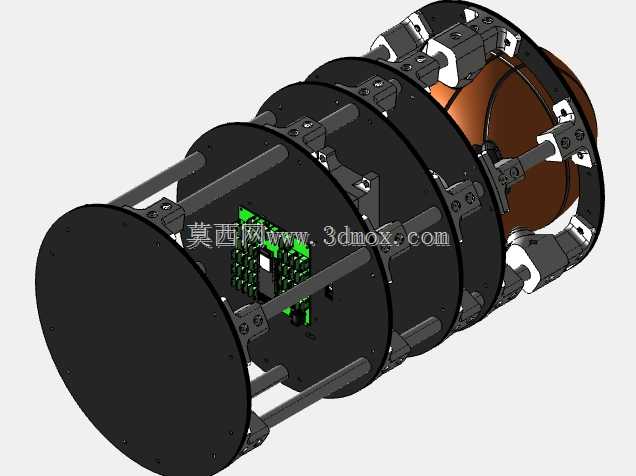




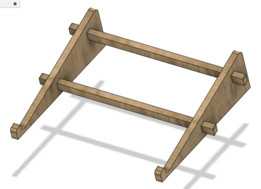
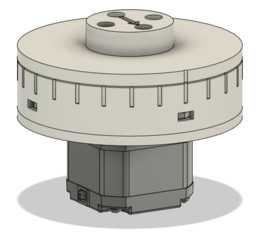
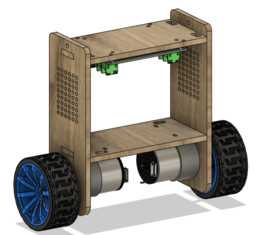
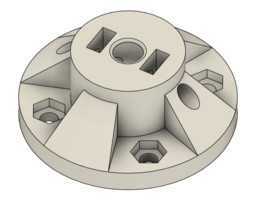
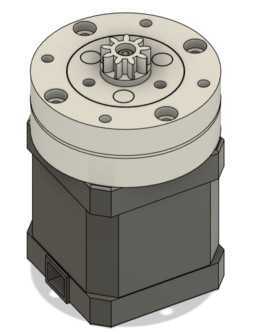
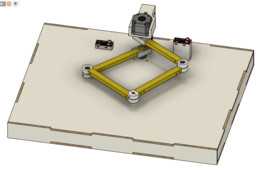
Ballbot 是一款移动机器人,旨在在单个球形轮上保持平衡,从而实现平稳、精确的全向运动。其紧凑灵活的外形使其非常适合在医院、办公室和住宅空间等人流密集或人流量大的环境中运行。您可以通过当前可用的各种人工智能驱动的平台了解有关 Ballbot 的更多信息。该项目旨在支持我的学术导师的研究。在此之前,我曾尝试过其他几个版本,但这是结构刚性有所提高的最终版本。尽管组装和维护可能有些挑战性,但该设计提供了明显更好的性能和可靠性。在本设计中,我使用了以下组件:- 4号篮球(用作主平衡球)。- 外径 16mm、壁厚 2mm 的铝管。- 带编码器的 JGB37-545 直流电机。- 58mm 全向轮。- 球脚轮。- MPU6050(陀螺仪和加速度计传感器)。- ESP32 扩展板。- BTS7960 43A 直流电机驱动模块。- 24V 电池组。- 使用 PETG 塑料 3D 打印组件。- 激光切割木质部件(5mm 胶合板)。感谢您的关注。点赞并关注以了解未来项目的最新动态。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,AutoCAD,Rendering