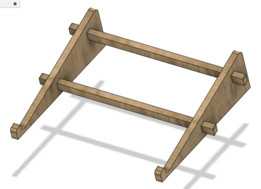
2 自由度并联机器人
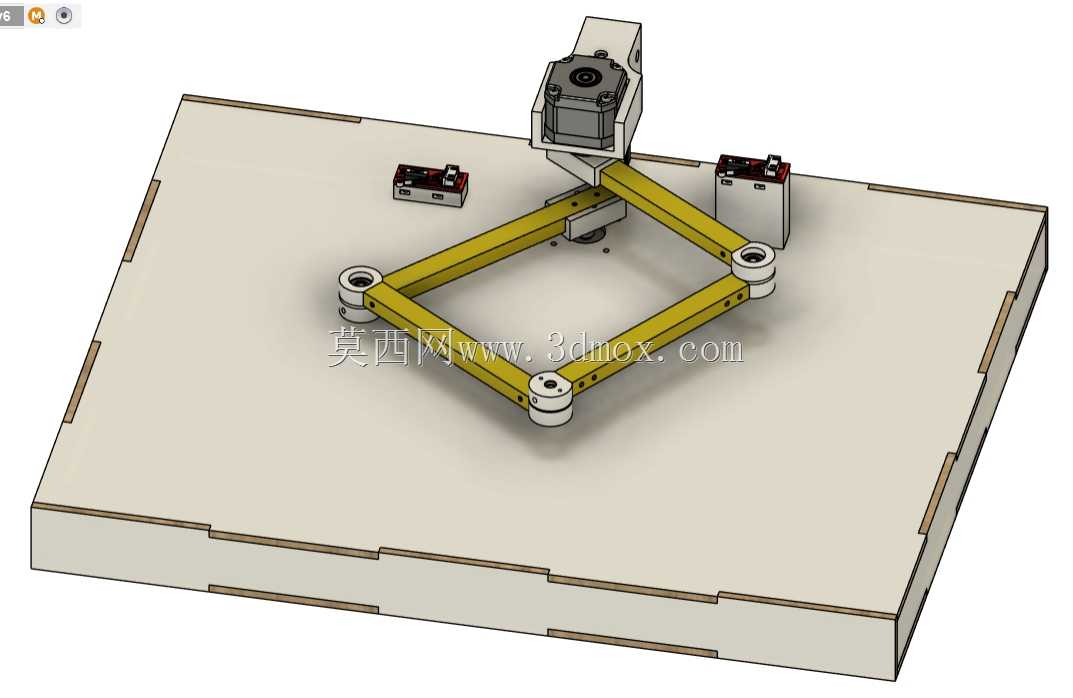



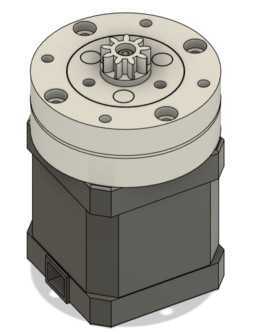
这款2自由度并联机器人基于五杆机构设计,具有运动速度快、精度高、响应时间短等特点,可应用于激光切割、拾放操作等二维环境。该模型是我作为三年级课程项目的一部分设计的。制作完成后,我注意到一些问题,例如难以高精度加工连杆以及结构刚度不足。不过,它仍然可以作为一个有用的参考设计。用于3D打印的文件为STL格式,用于激光切割的文件为DXF格式。感谢您的关注。点赞并关注,以便及时了解未来项目的最新进展。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,AutoCAD,STL