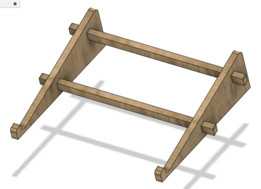
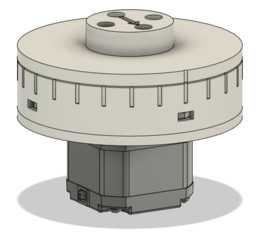
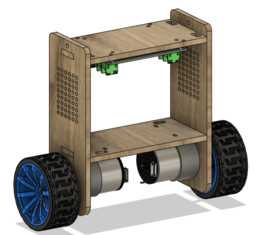
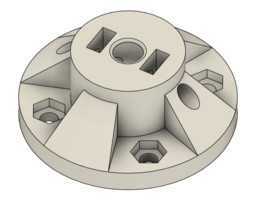
3 自由度机械臂






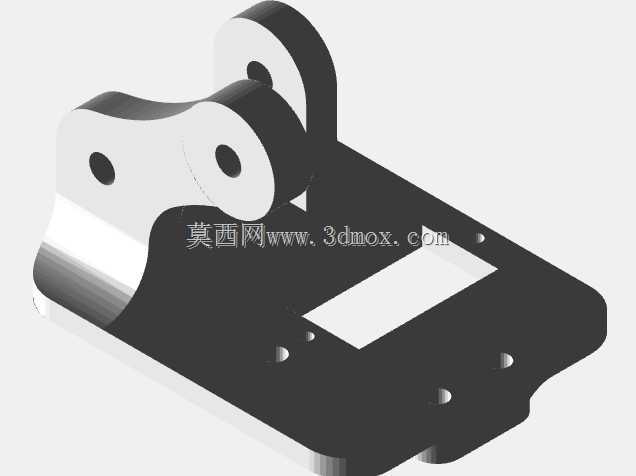
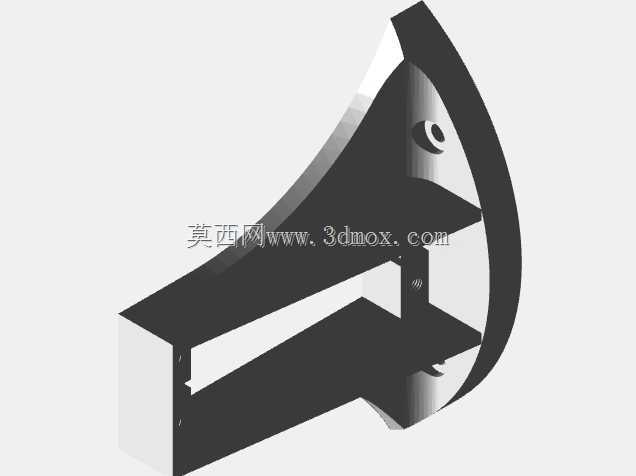







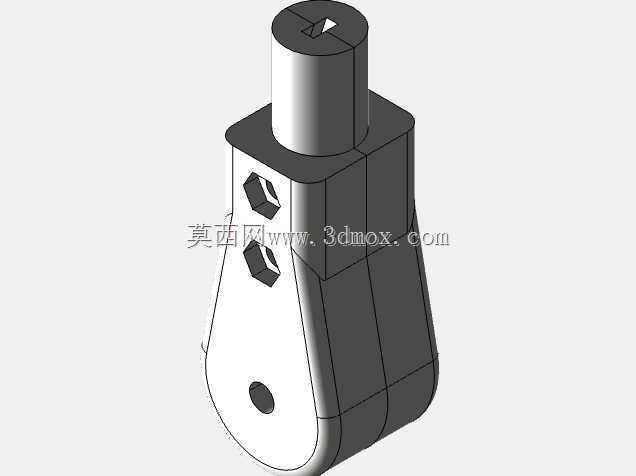
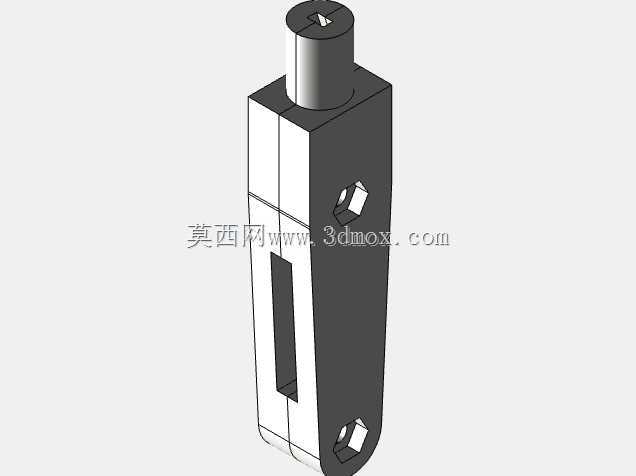
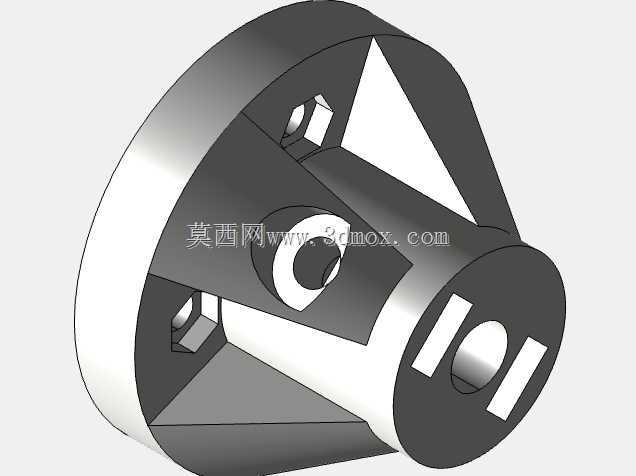
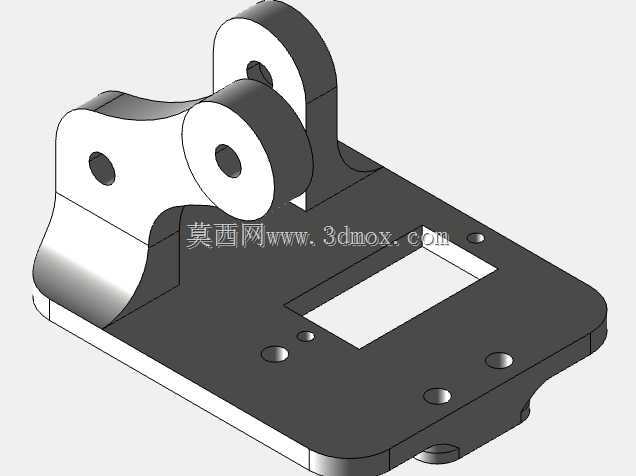
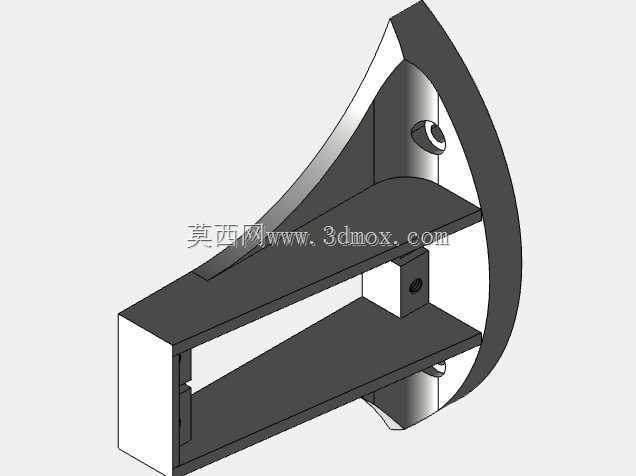
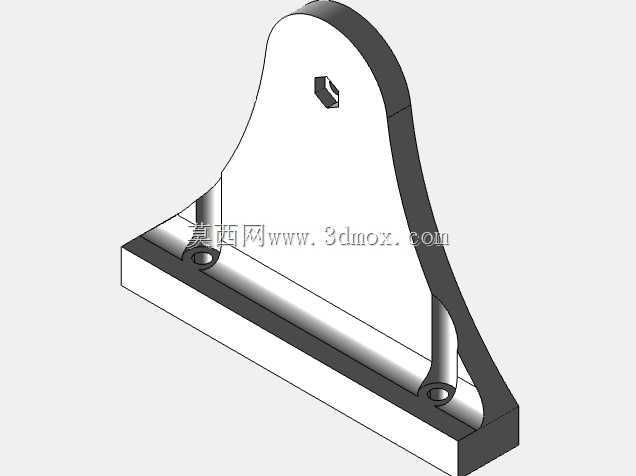
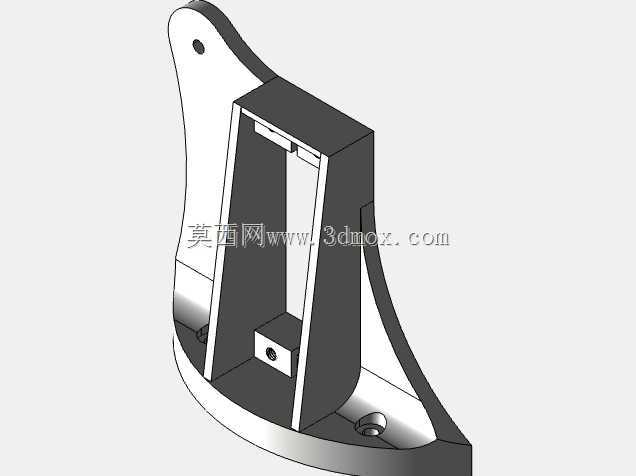
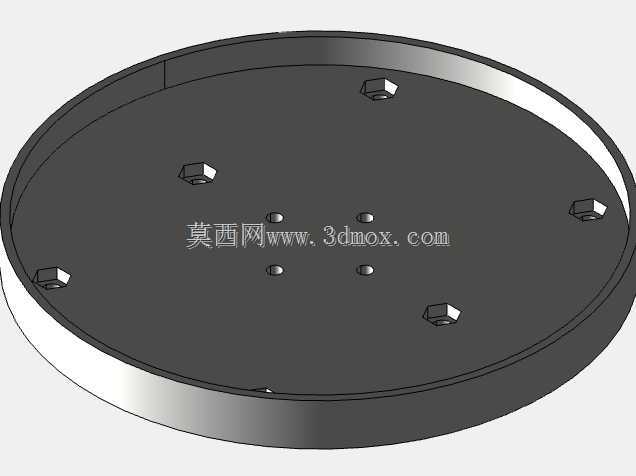


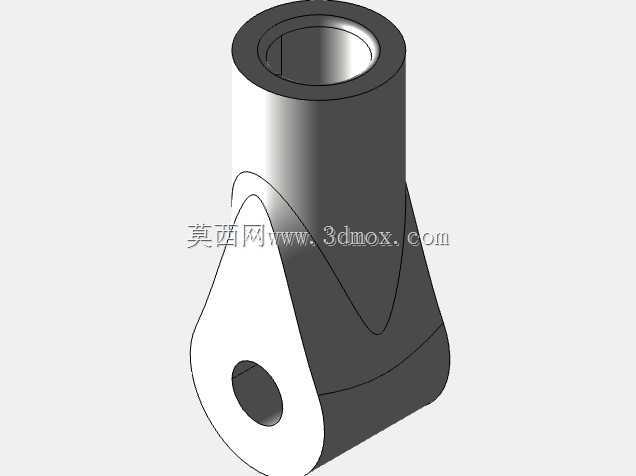
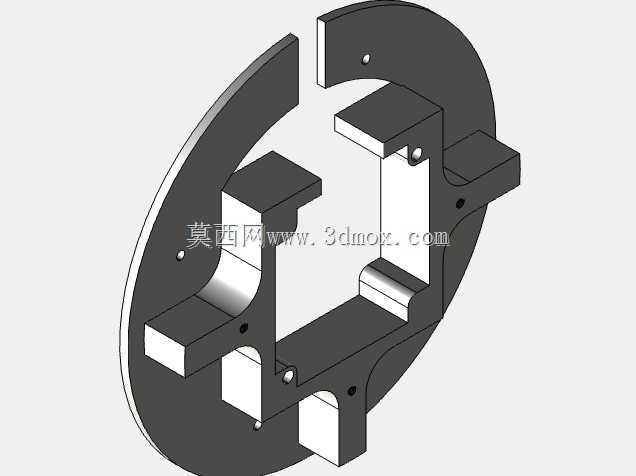
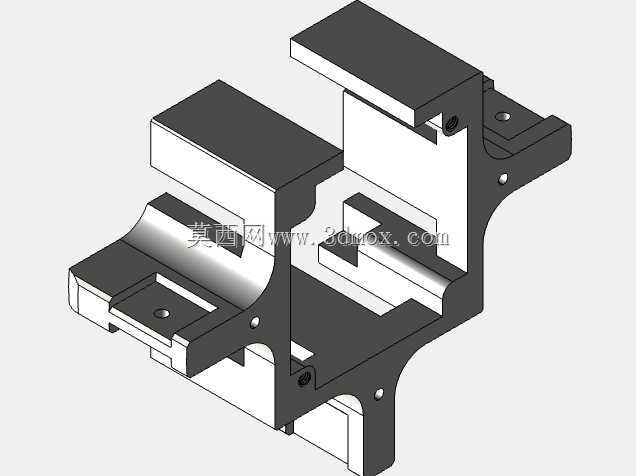

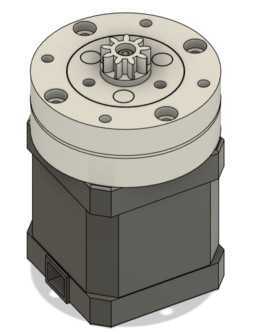
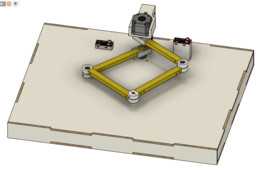
三自由度机械臂采用平行四边形连杆结构,确保夹爪在操作过程中始终与地面保持平行。在本项目中,我在状态 1 中使用了一台 Nema 23 步进电机,在状态 2 和状态 3 中使用了两台 DS5160 伺服电机。此外,我还使用了 16mm 铝轴(壁厚 2mm)和 6mm 铝轴作为结构部件。其余部件则采用 3D 打印技术制造。这款三自由度机械臂设计时间已久,当时我的经验、知识和整体设计技能都还比较有限,因此该版本存在一些根本性的设计缺陷。因此,此图纸仅供参考。感谢您的关注。请点赞并关注,以便及时了解后续项目进展。
------分隔线----------------------------
- 上一篇:柔软的下巴,适合 Kurt
- 下一篇:原型 PCB 70x90mm

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Fusion 360,Rendering