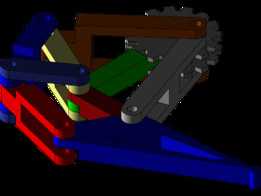
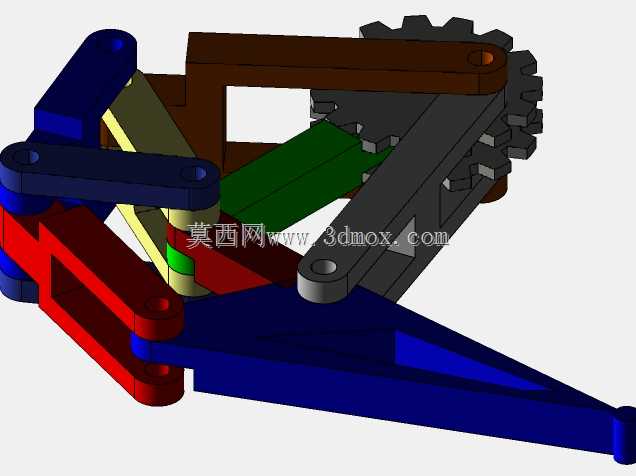
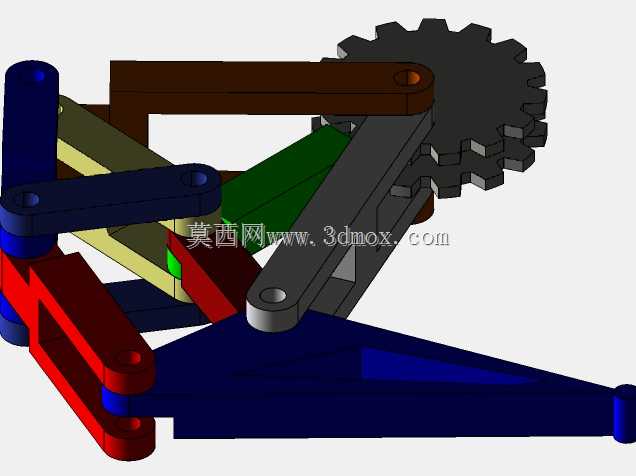
机械腿运动机构
腿式机器人,或称步行机器,是为在崎岖地形上运动而设计的,需要控制腿部执行器来保持平衡,通过传感器来确定脚的位置,并通过规划算法来确定运动的方向和速度。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
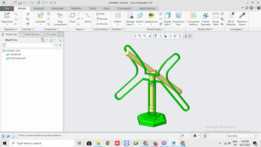
- 包含文件 :Solid Edge,PTC Creo Elements,Other















腿式机器人,或称步行机器,是为在崎岖地形上运动而设计的,需要控制腿部执行器来保持平衡,通过传感器来确定脚的位置,并通过规划算法来确定运动的方向和速度。