自稳勺
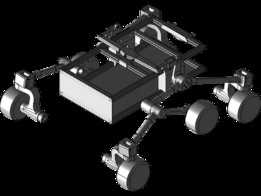
首个原型正在开发中――它主要通过上下和左右移动来抵消运动,从而回到初始位置。技术栈包括:Arduino Nano、2个舵机、MPU陀螺仪传感器、9V硬件电池、3D打印的勺形放大器和外壳。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES


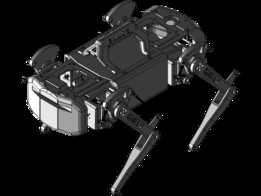
首个原型正在开发中――它主要通过上下和左右移动来抵消运动,从而回到初始位置。技术栈包括:Arduino Nano、2个舵机、MPU陀螺仪传感器、9V硬件电池、3D打印的勺形放大器和外壳。