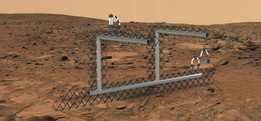
ARMADAS概念的模块化管道和装配机器人。






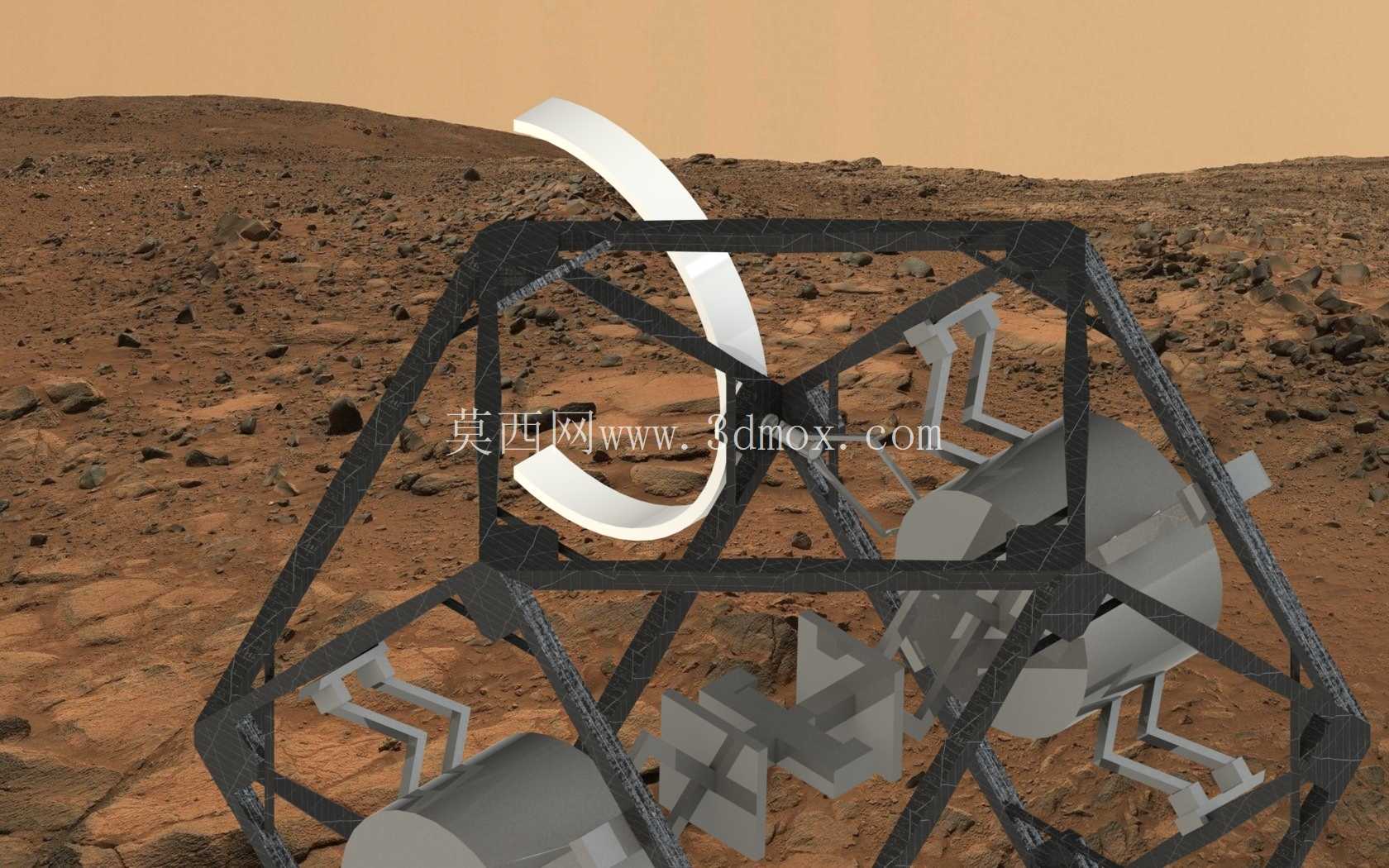
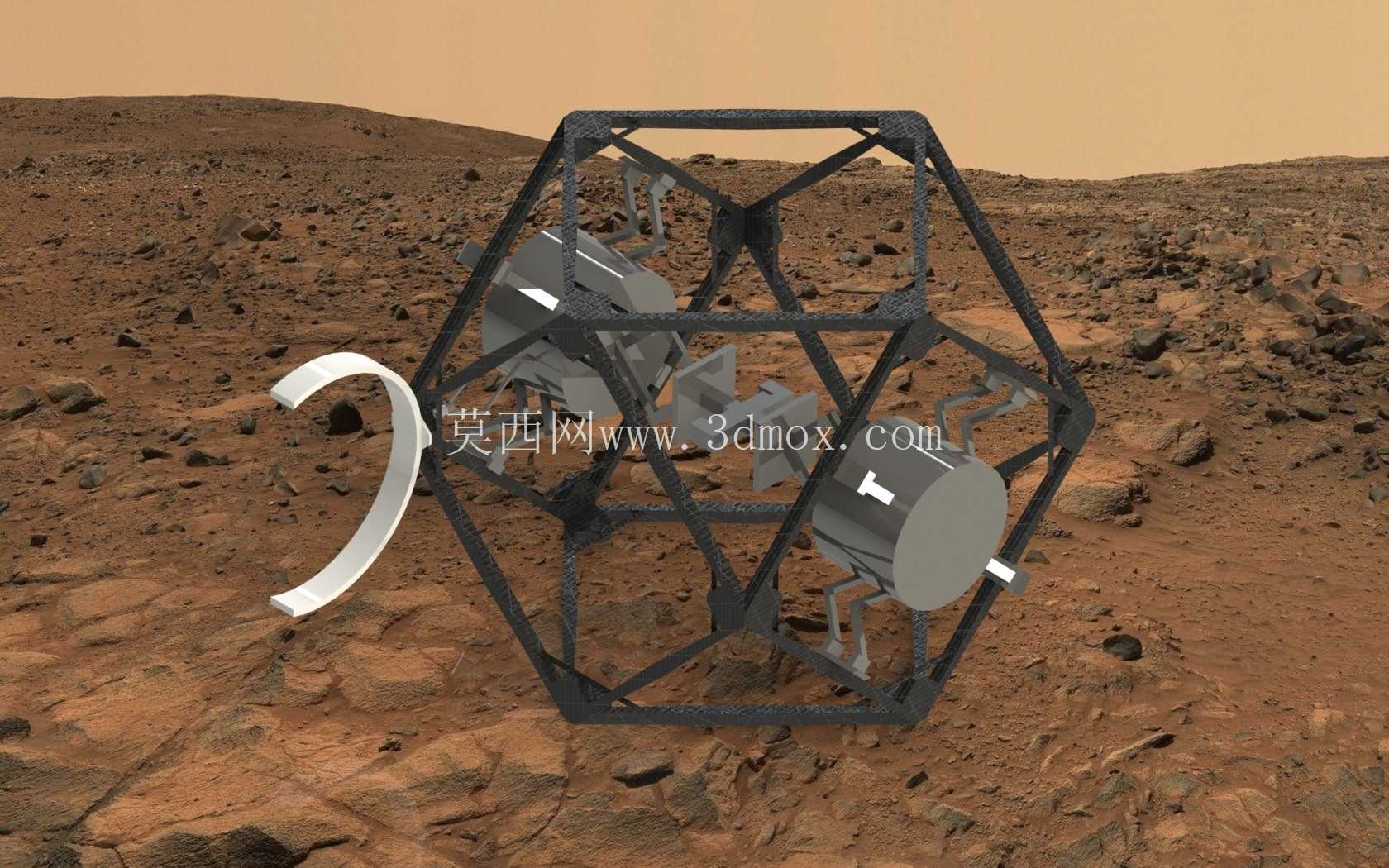

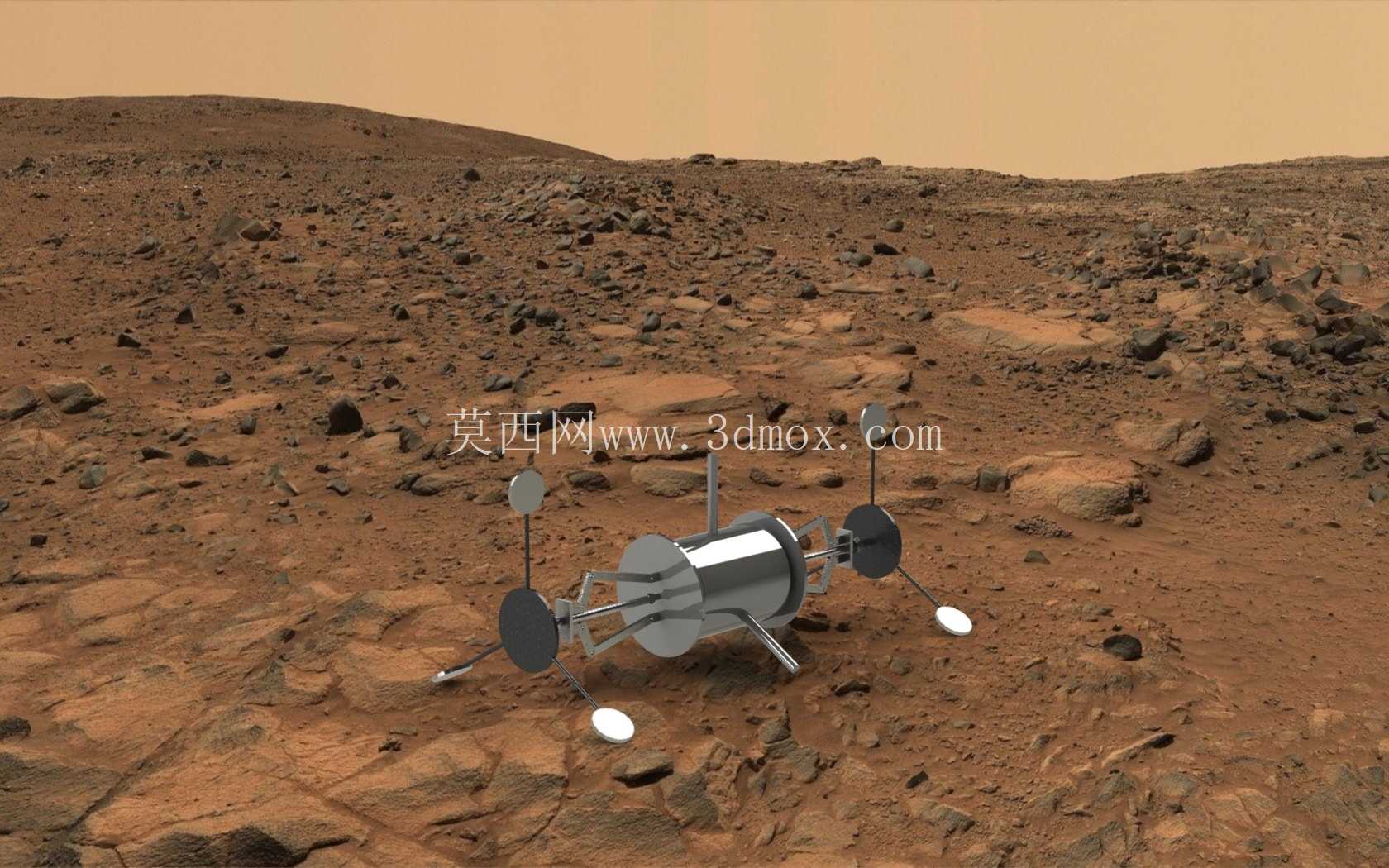
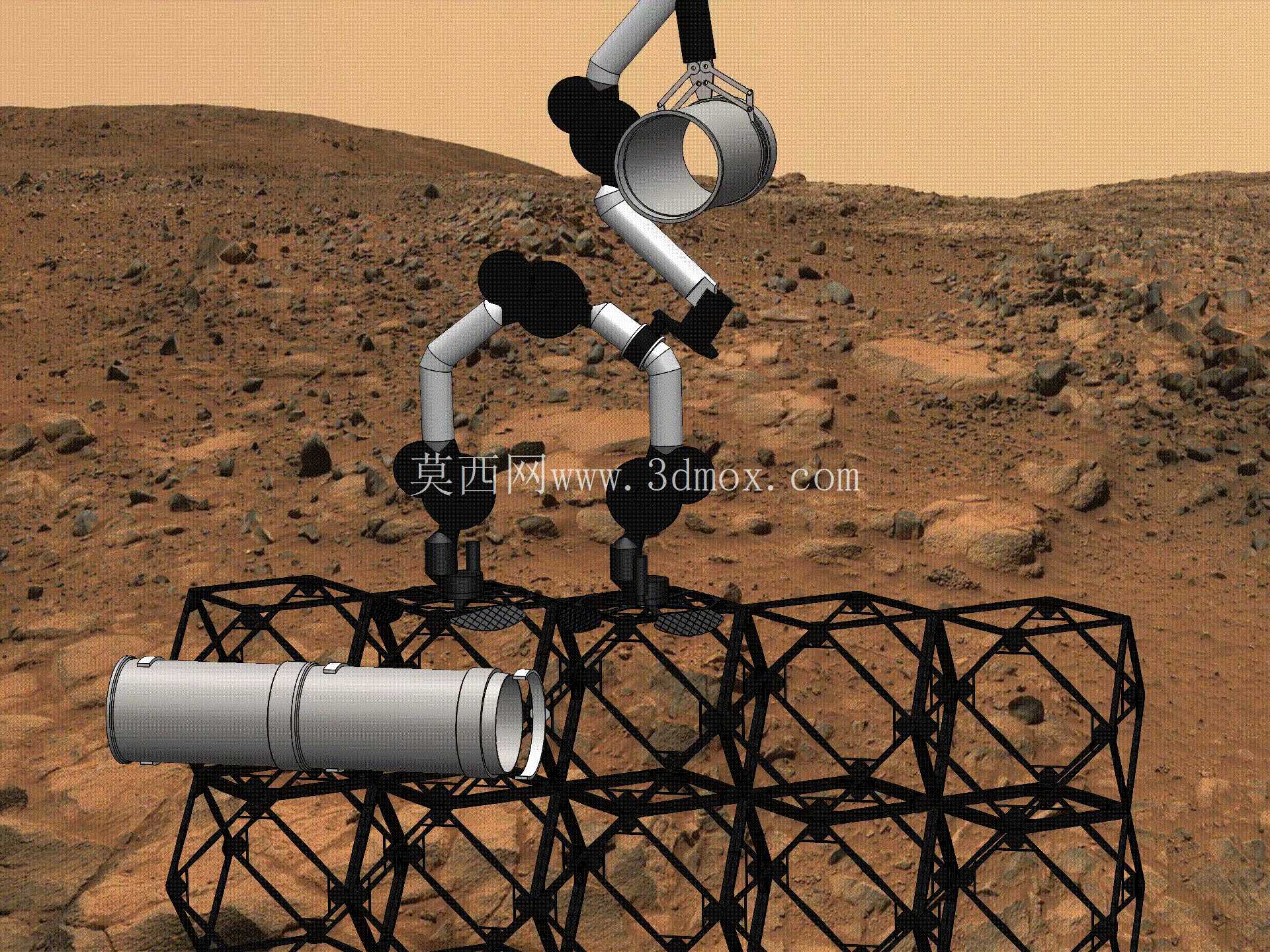
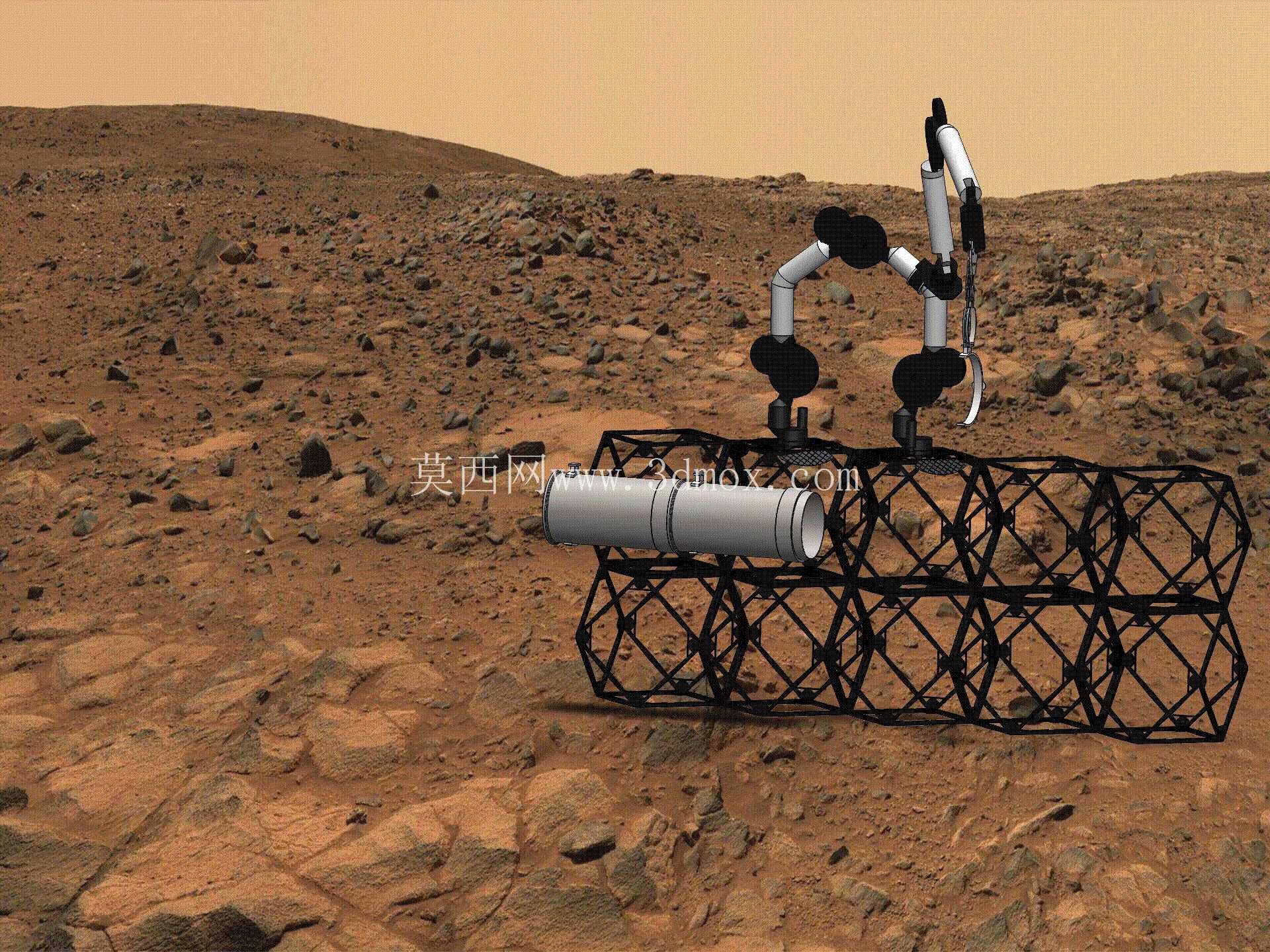
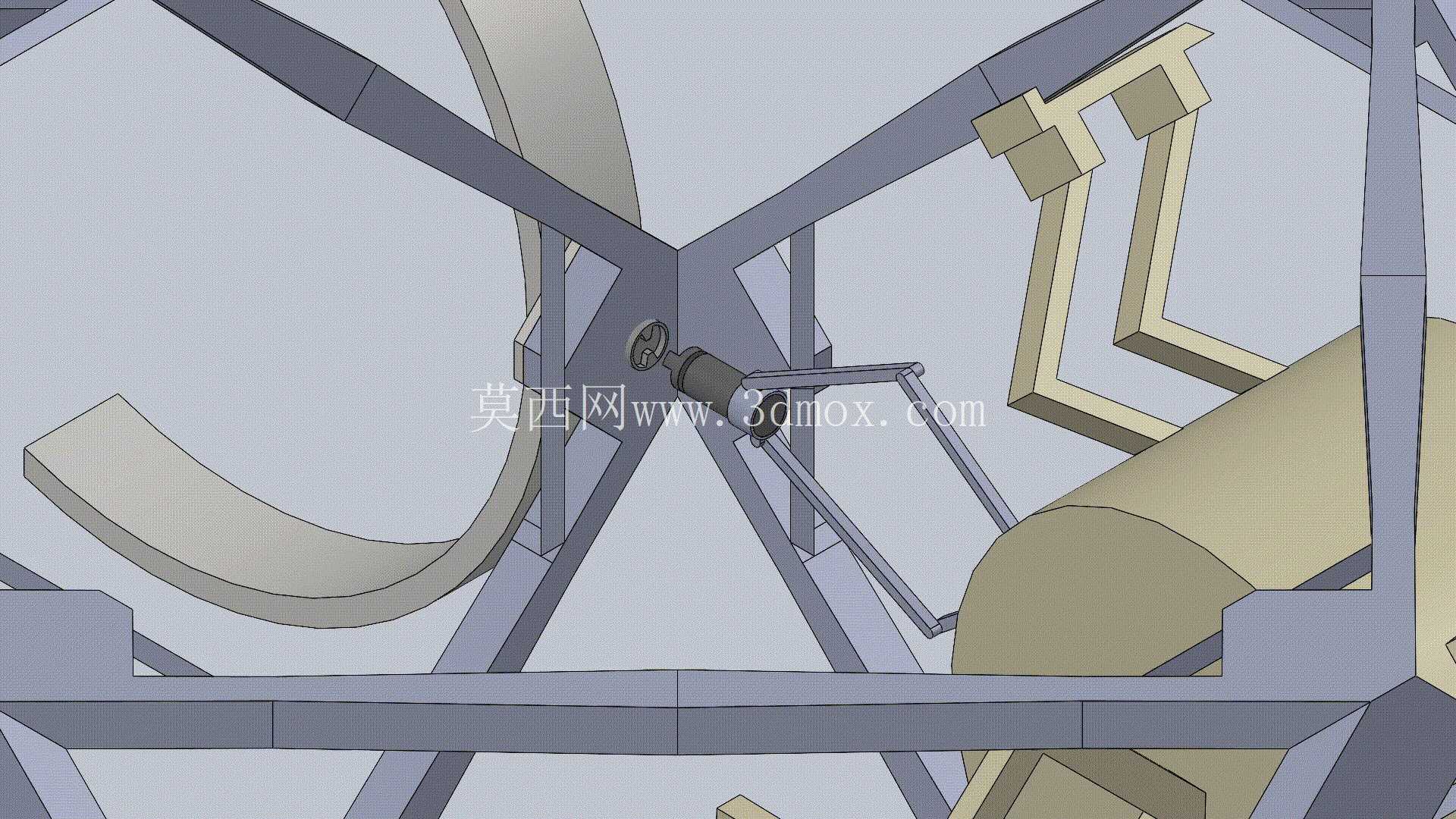

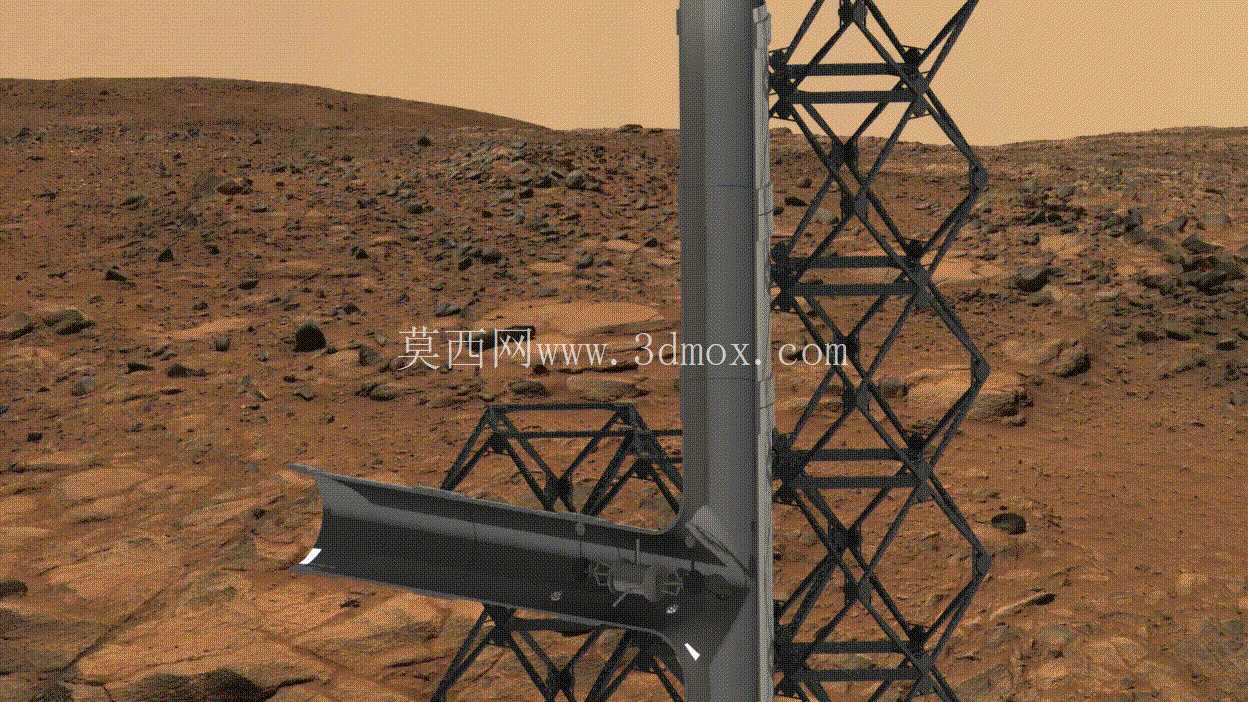
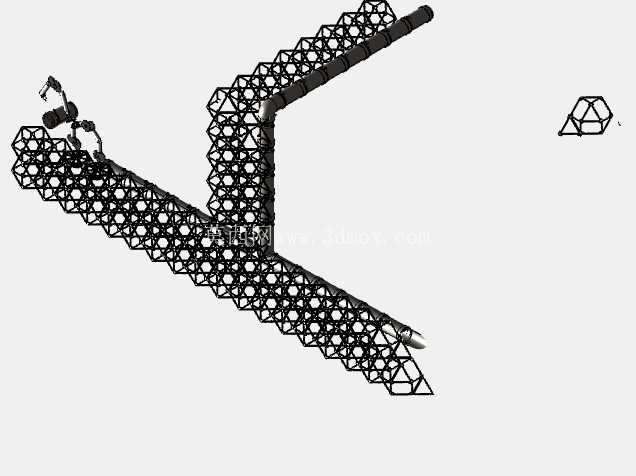
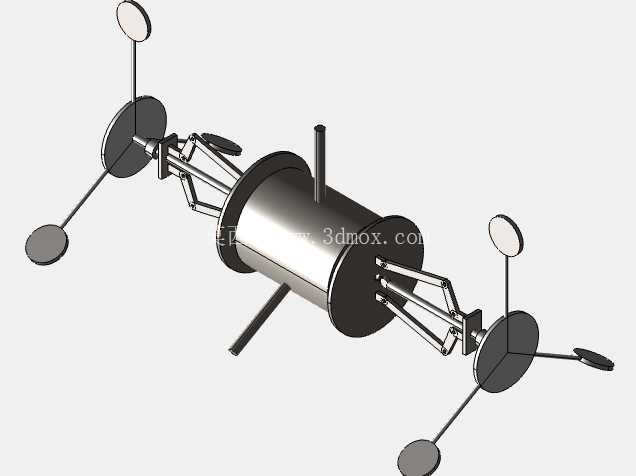
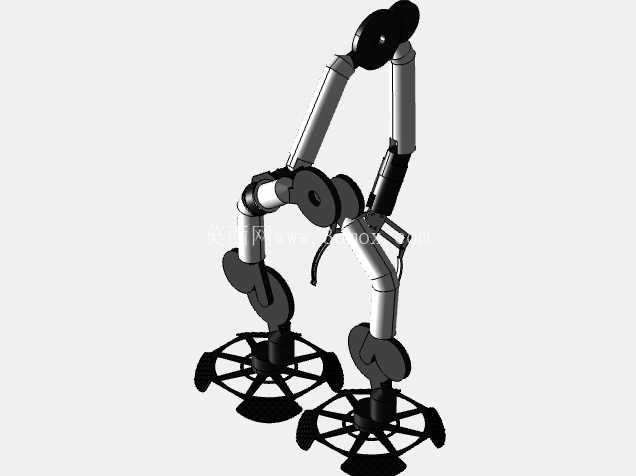
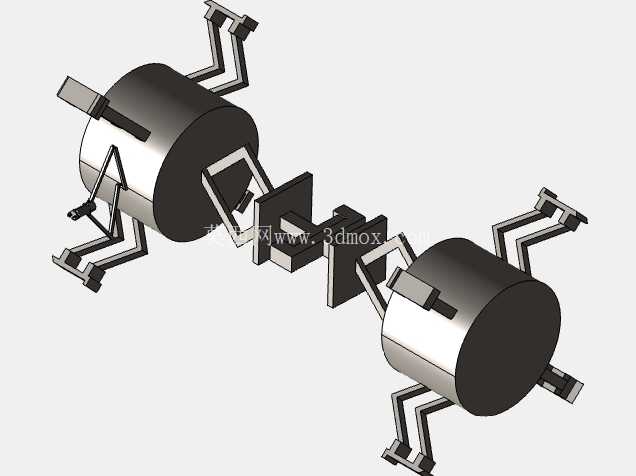

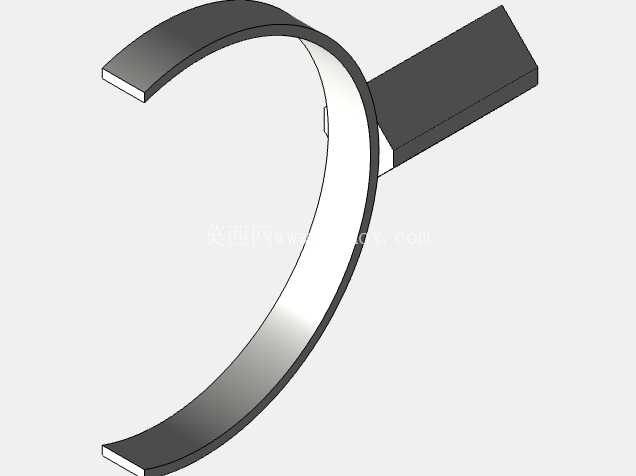


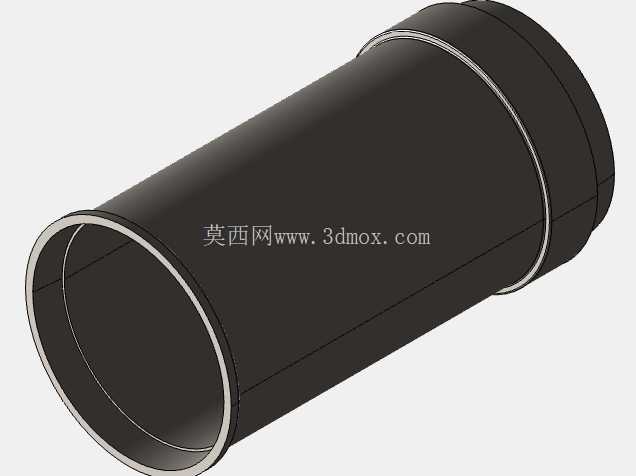
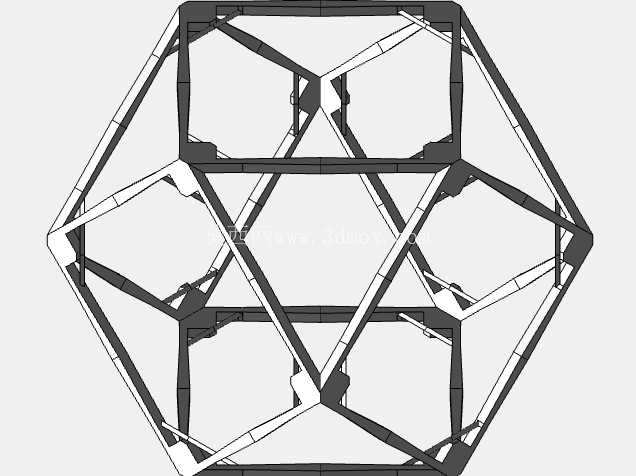
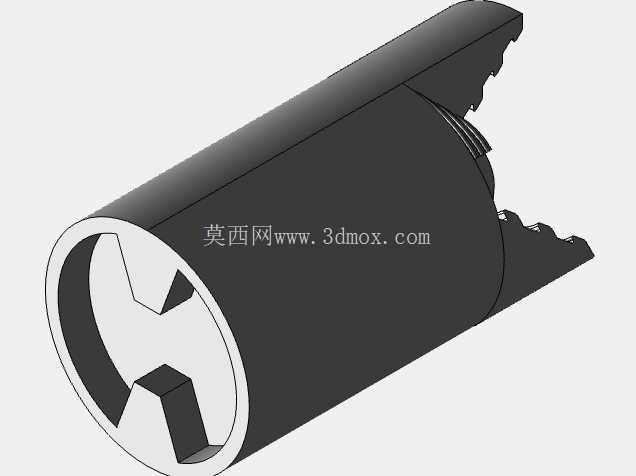
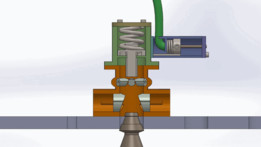
大家好!我们是Iván de Lajonquiere、Dante Pretini(Dante Pretini)和Paulino Viano(Paulino Viano),我们一起参加这项挑战赛,进行小组合作。我们是罗萨里奥国立大学精密科学、工程与测量学院(FCEIA UNR,https://web.fceia.unr.edu.ar/es/)的机械工程系学生。我们隶属于Marcelo Valderrey教授领导的机构与机器综合(SMM)教研室。我们的想法主要是参考ARMADAS概念中的机器人和体素,制作可以用C形夹具固定在体素上的管道模块。这些管道采用通用设计,能够输送任何类型的流体,并可与使用电缆的连接系统配合使用。用于固定管道的挂钩将由一台基于NASA用于连接体素的机器人进行固定,我们对其伺服电机的布置进行了修改。挂钩使用NASA设计的“可逆式双性机械紧固件”系统进行固定。挂钩的定位由机器人完成,我们决定以SOLL-E机器人为基础,并添加第三个机械臂来执行这些任务。该机器人还将负责定位管道模块。最后,模块之间的连接将采用激光焊接,焊接工作将由一台在管道内运行一次的机器人完成。
组装完成后,它绕自身轴线旋转120o以形成焊接缝。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering