六轴机械臂
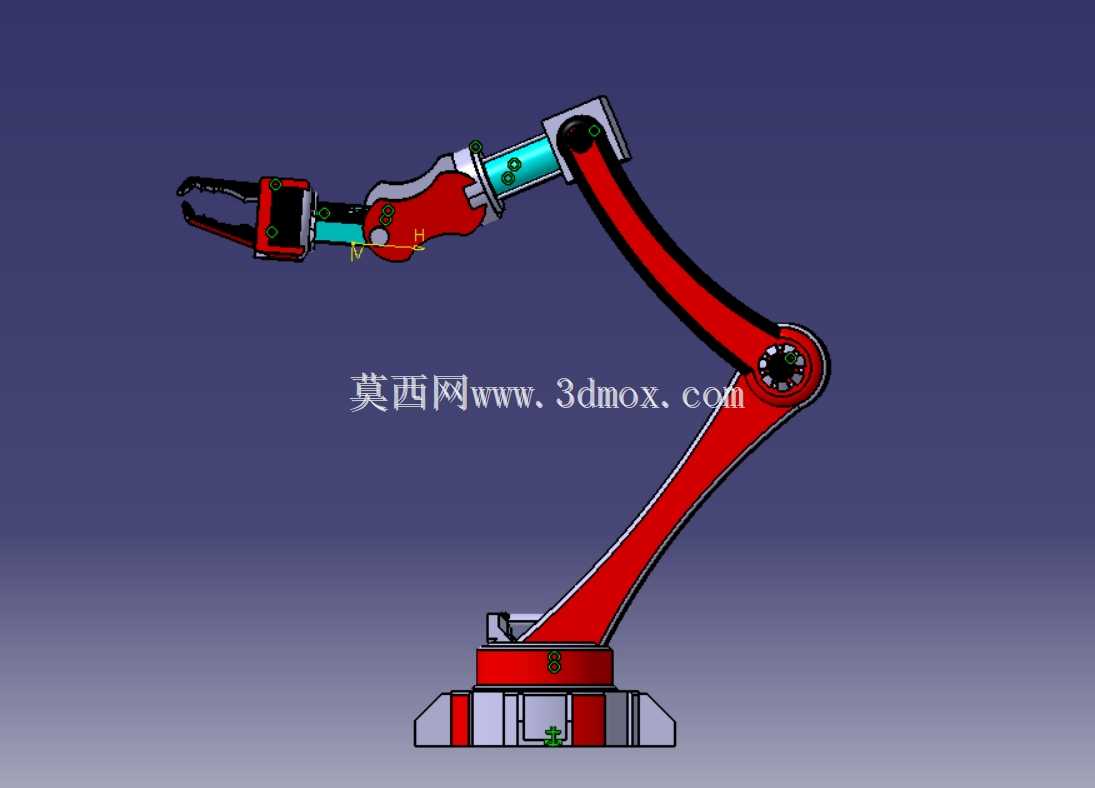
六轴机械臂 – 机械设计 (CATIA V5/V6) 使用 CATIA 设计了一个全参数化的六轴机械臂,包括零件建模、多体装配和运动学仿真。应用精确的约束条件,在所有六个自由度上模拟工业机器人的运动。创建了详细的绘图图纸、物料清单 (BOM) 和机构分析,以验证关节旋转、可达性和无碰撞运动。优化了设计,以提高强度重量比和可制造性。技能:CATIA 零件设计、装配设计、绘图、运动学、机构仿真、工业机器人。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,Rendering