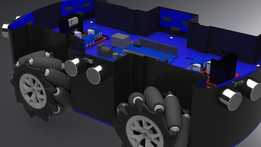
避障遥控车 – 完整 SolidWorks 装配图(Arduino、6 个超声波传感器、4 个电机)
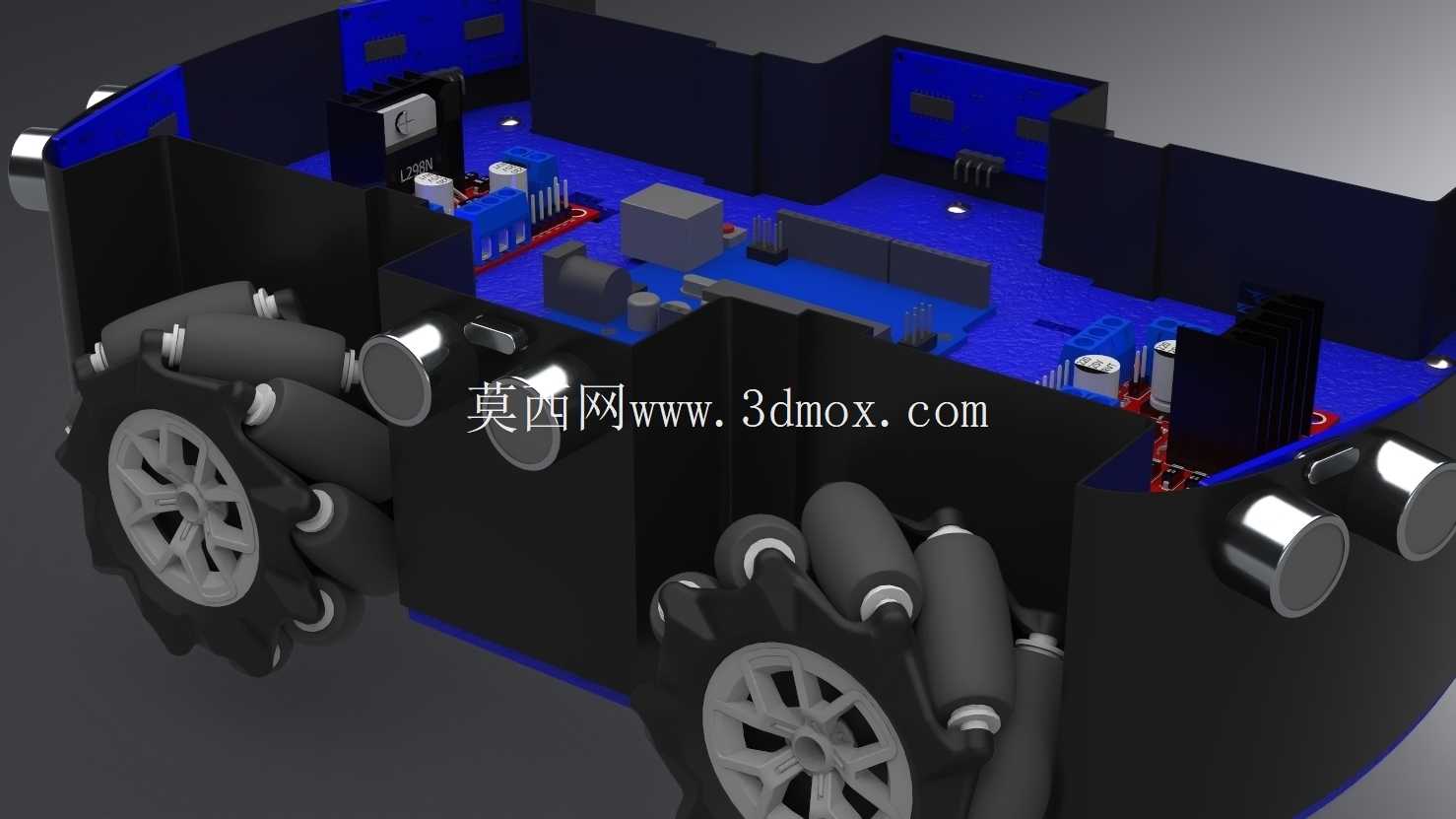
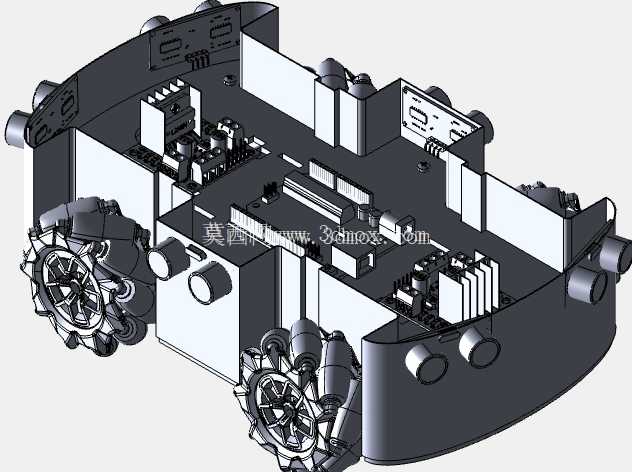
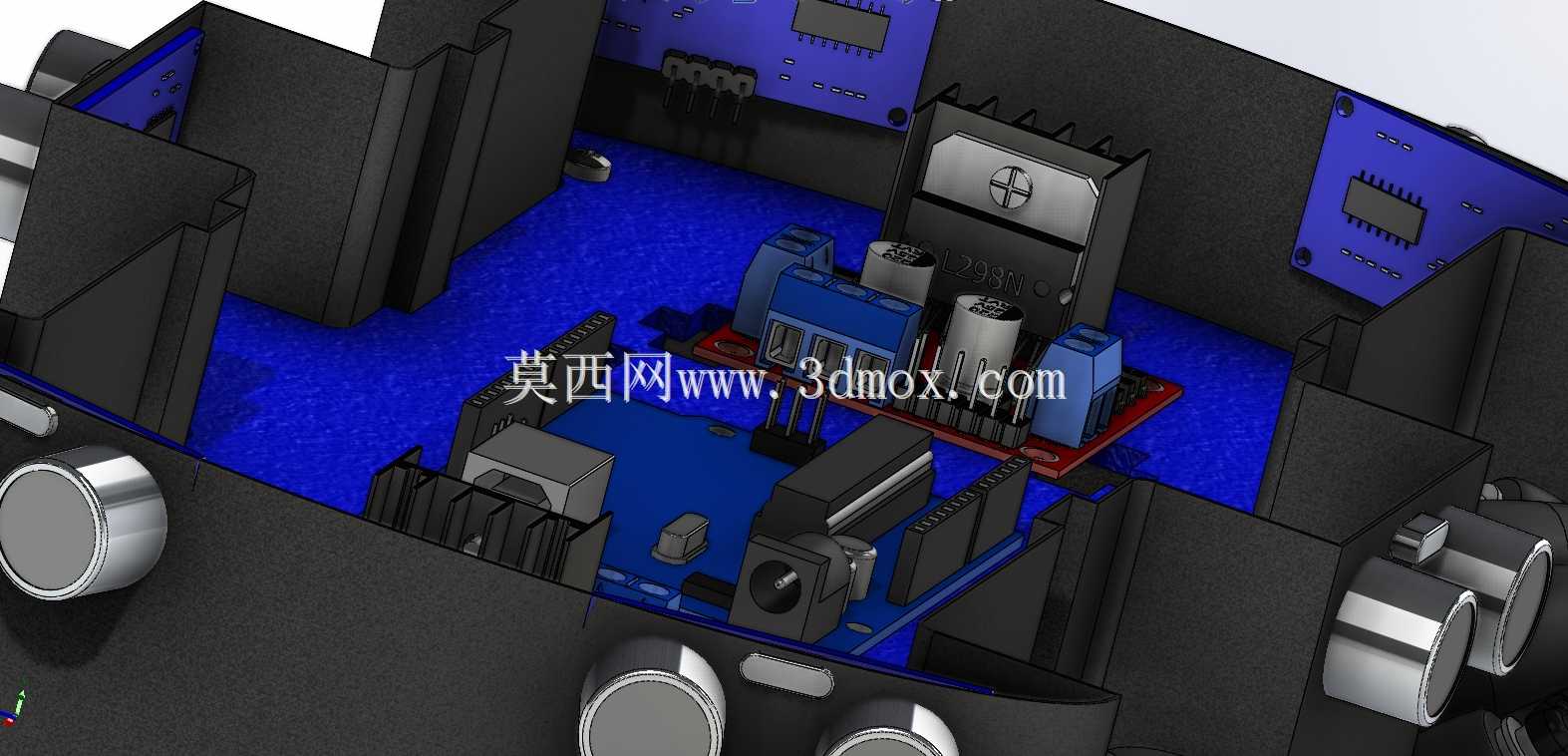
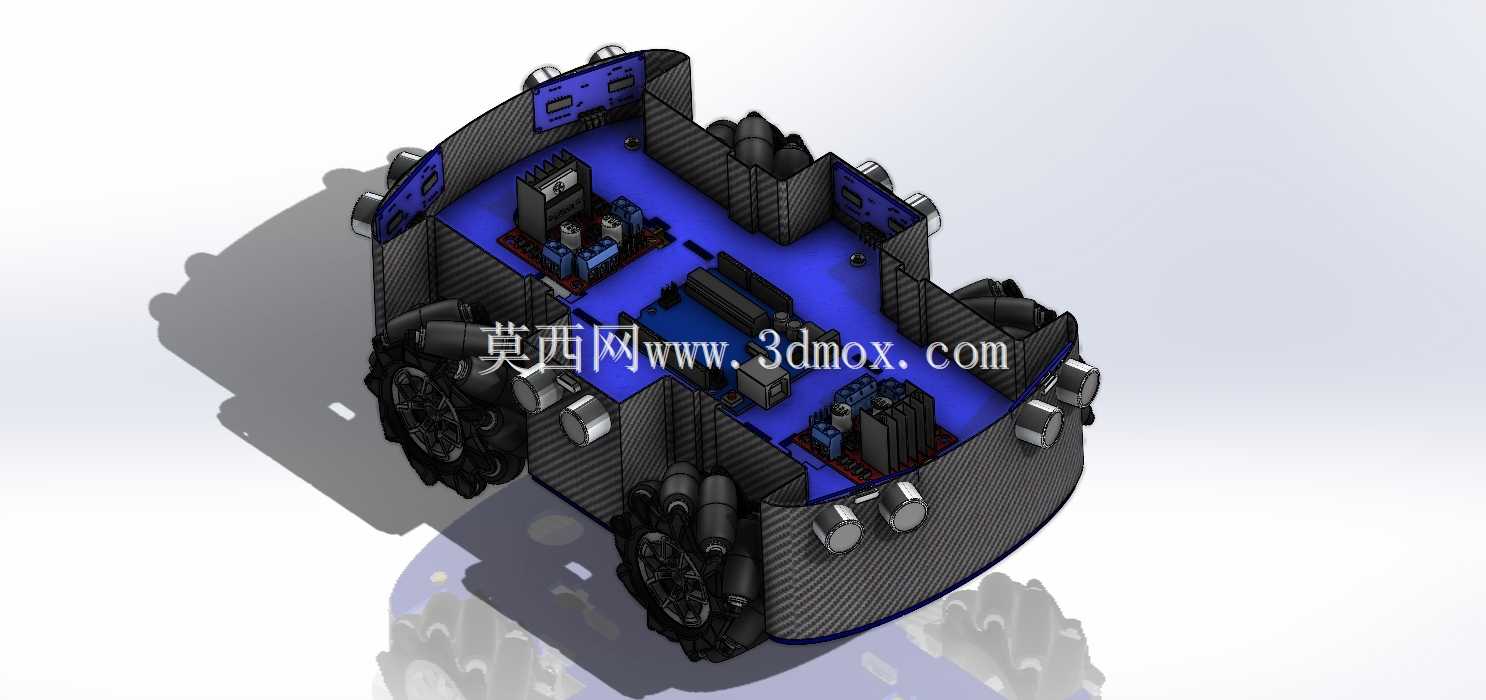




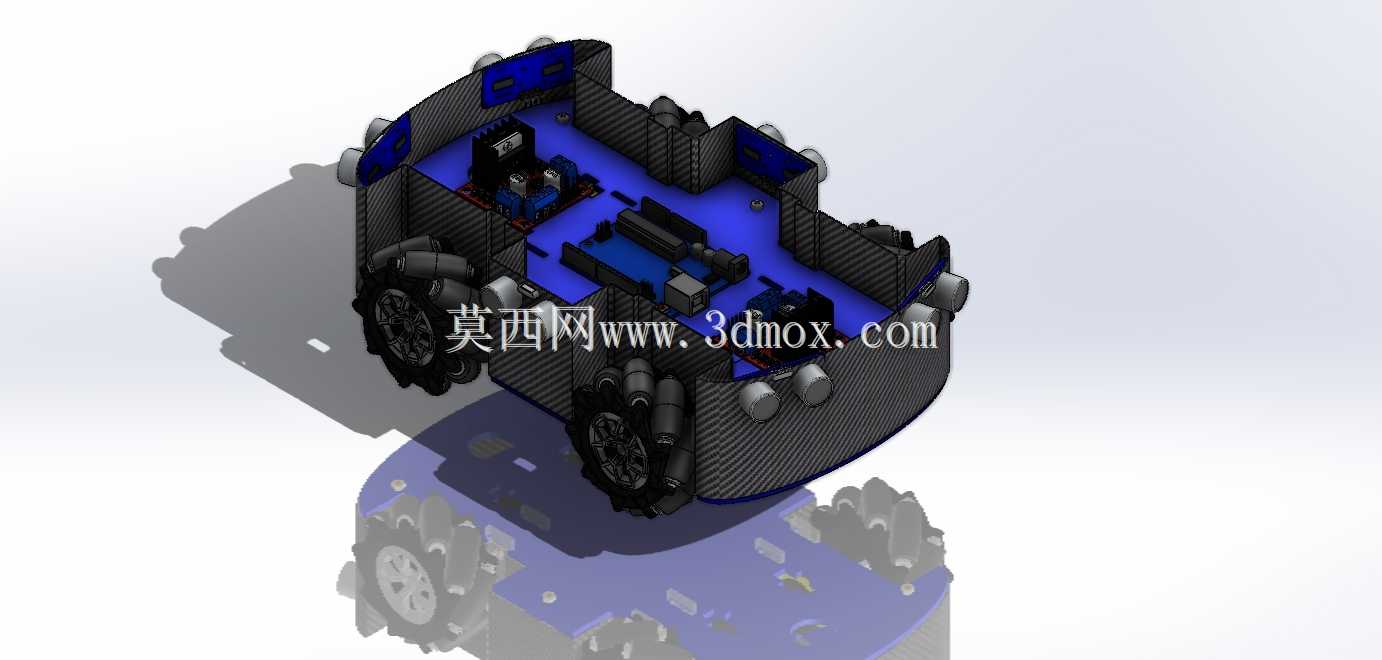
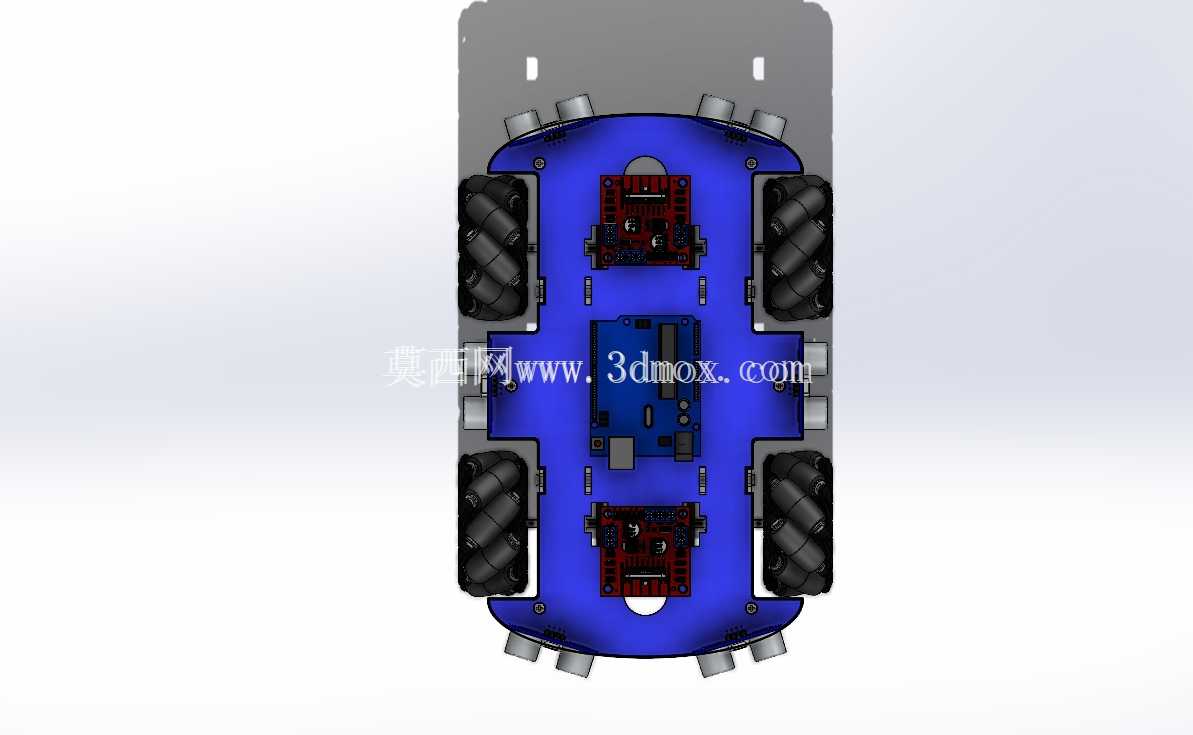

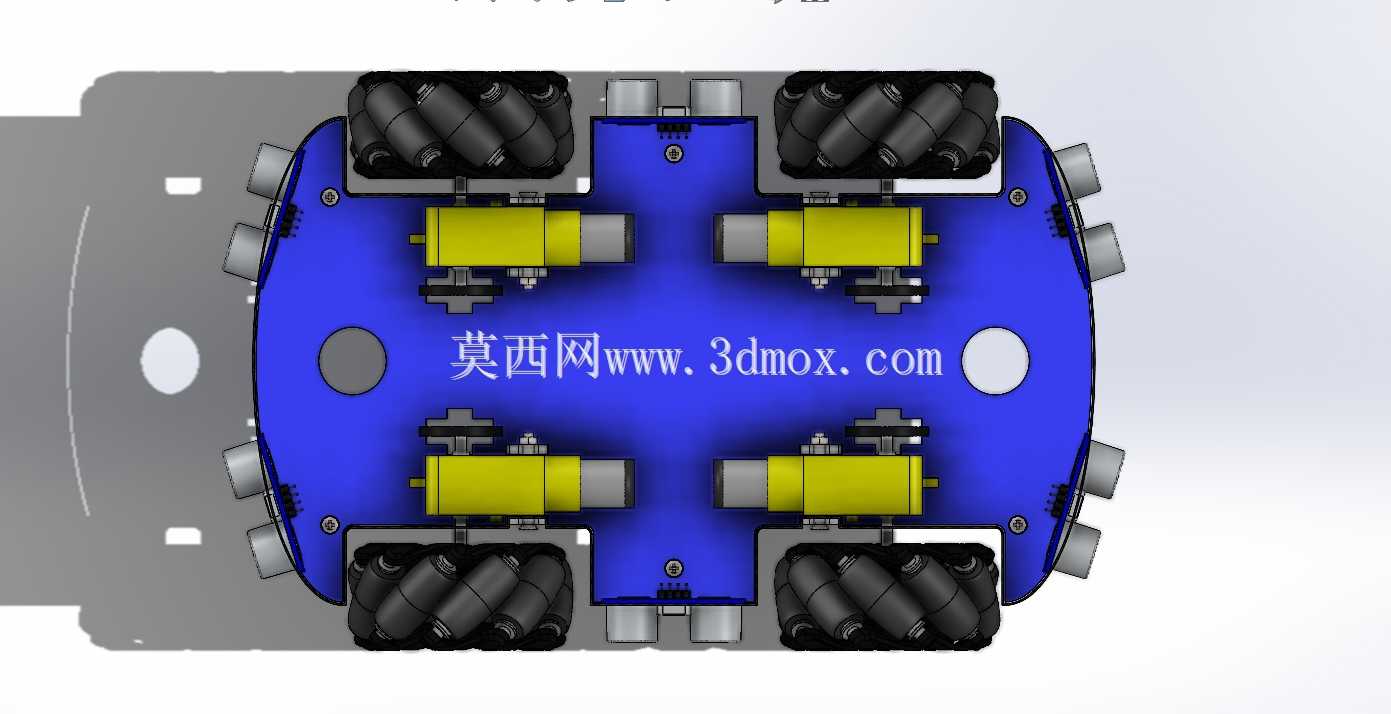

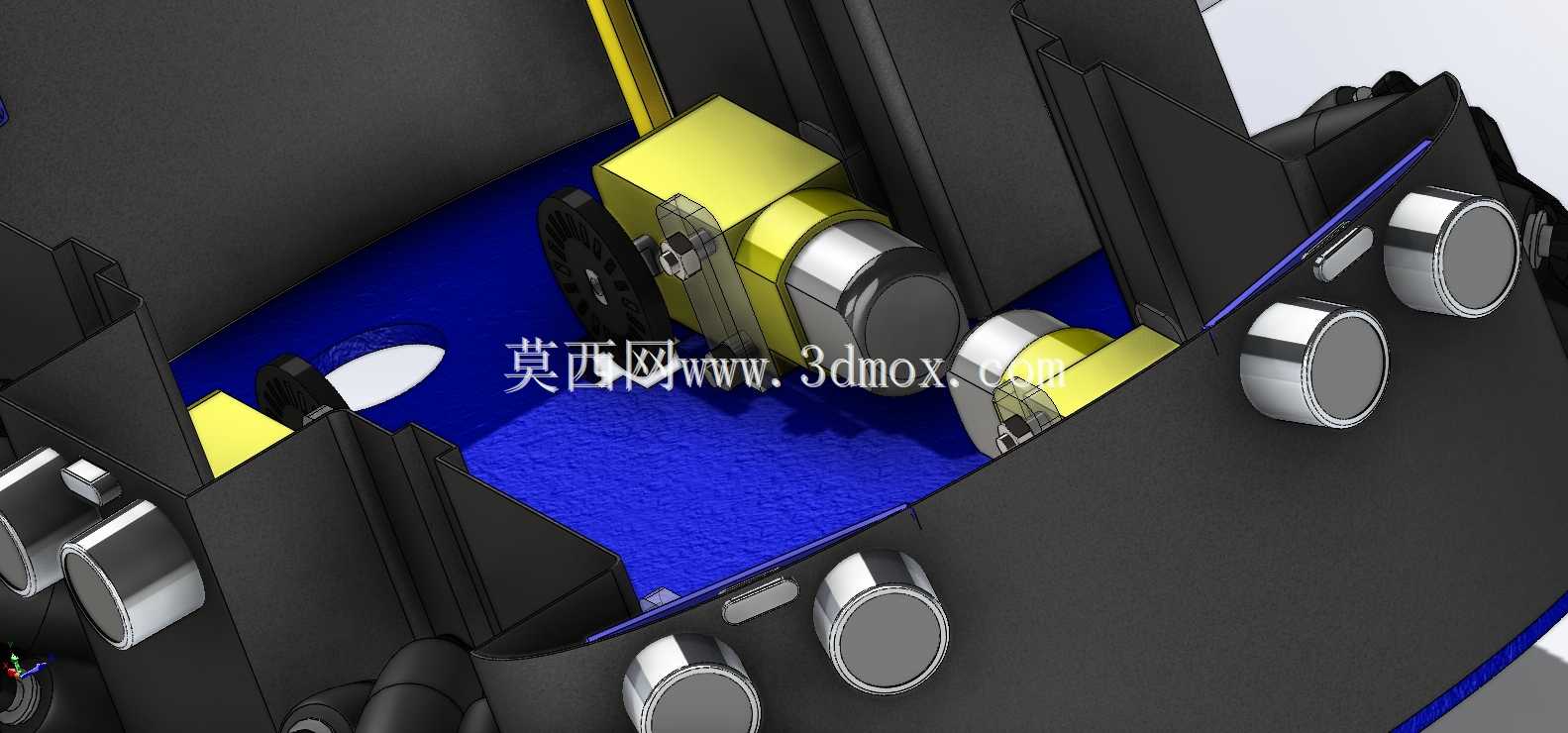
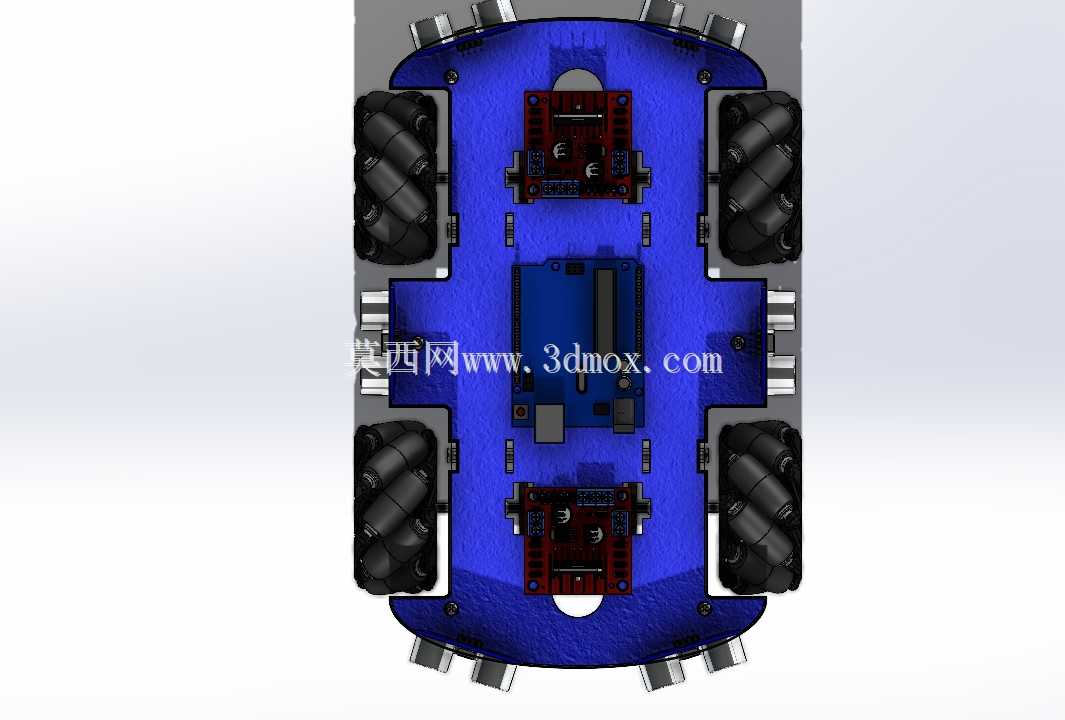
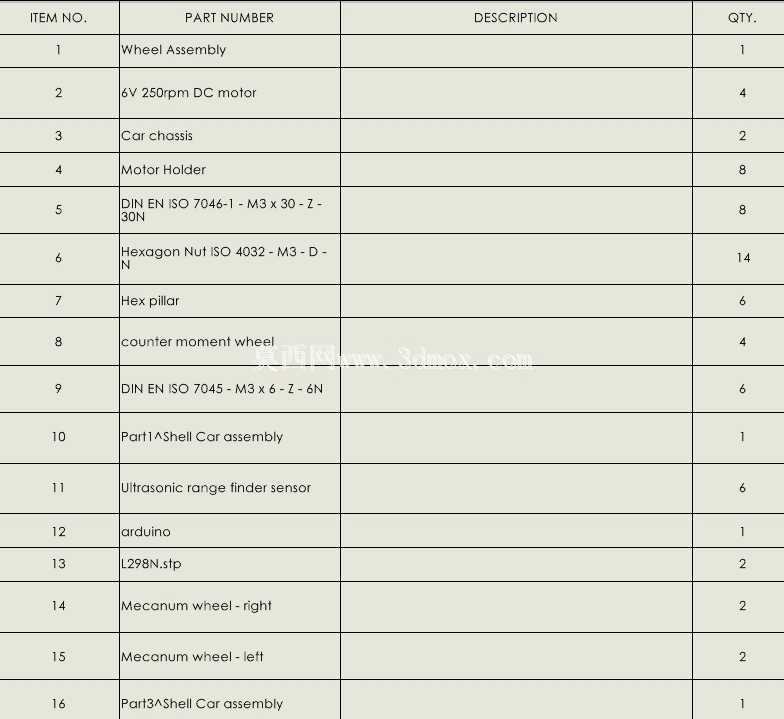
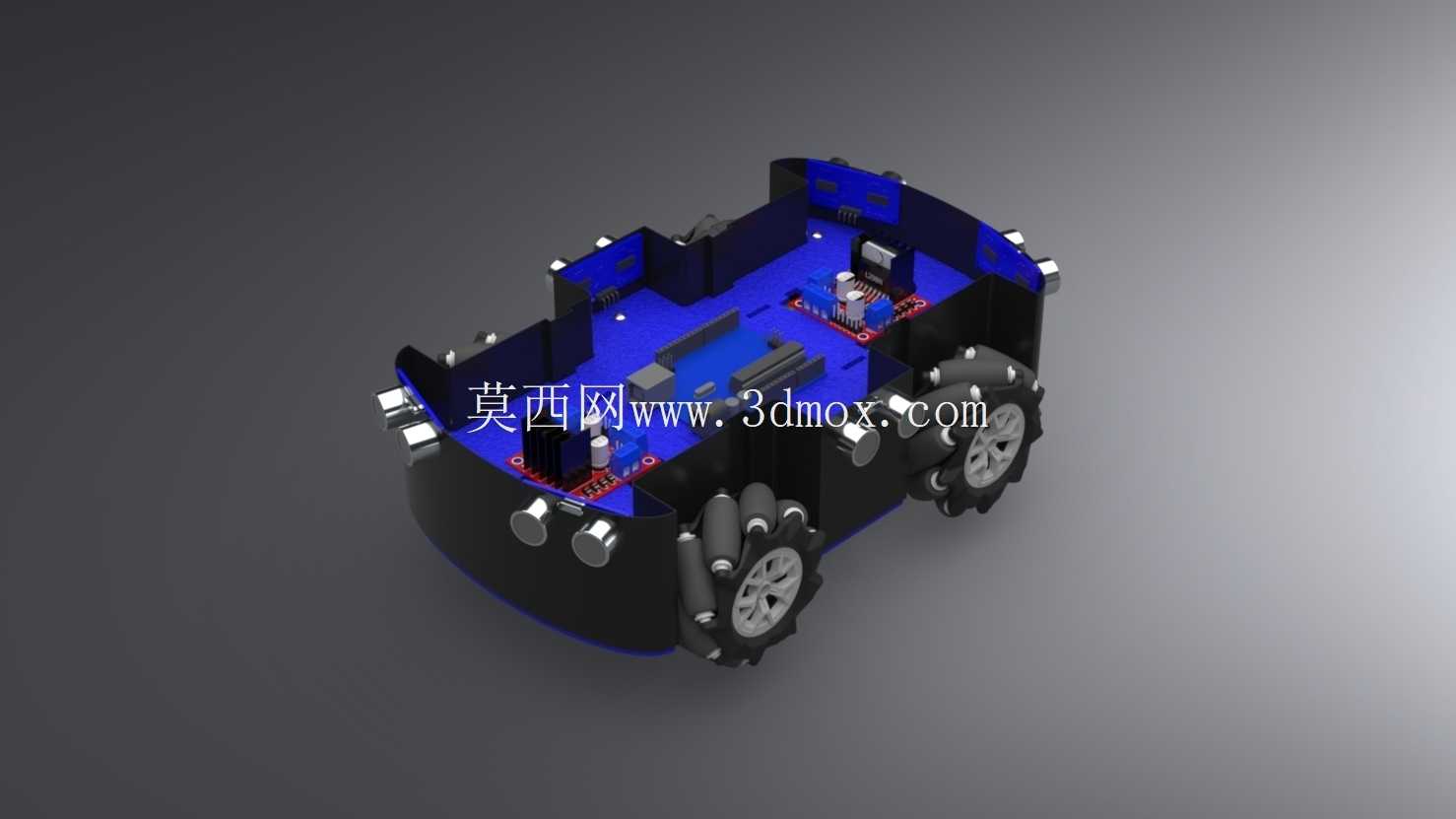

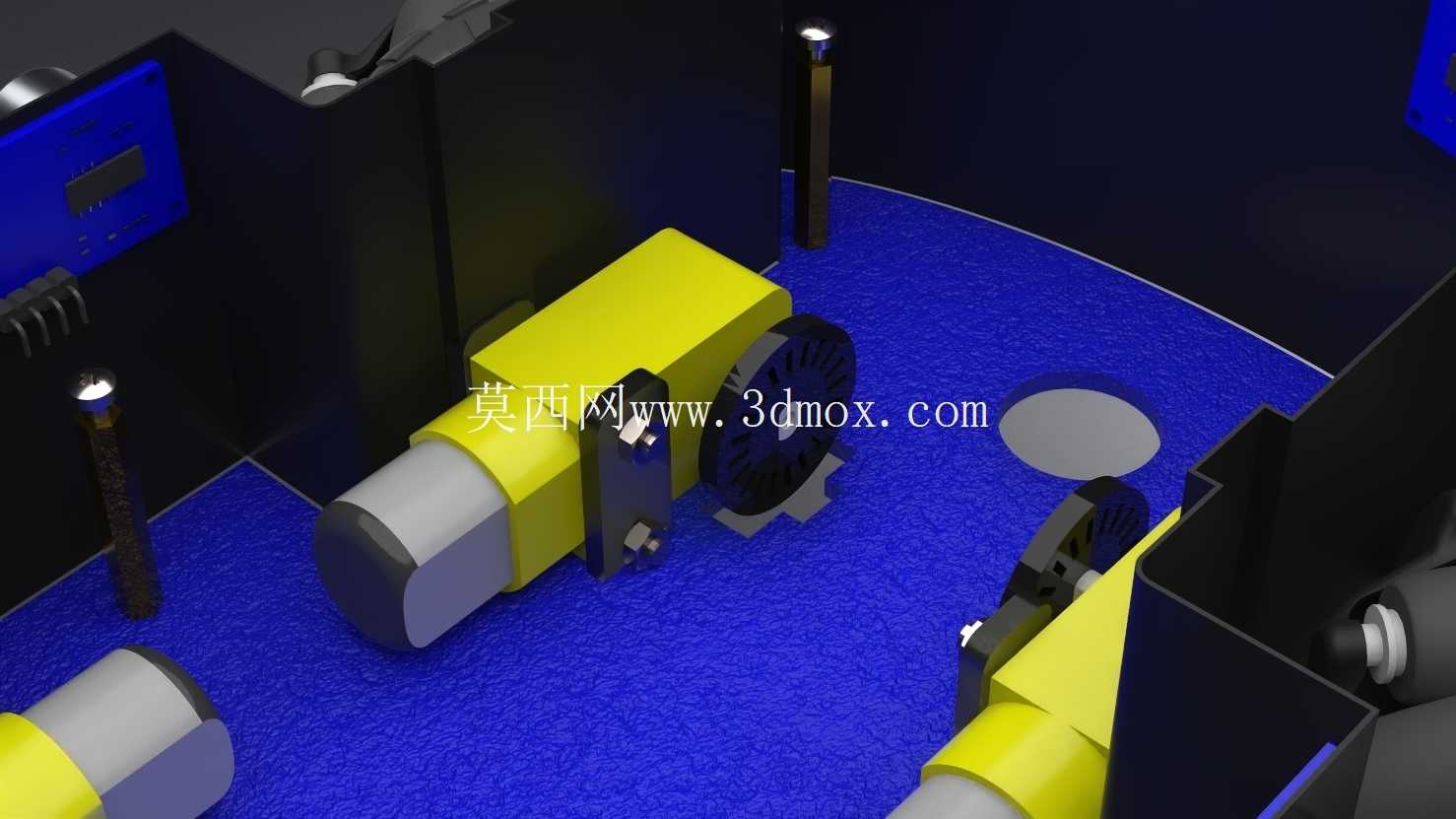
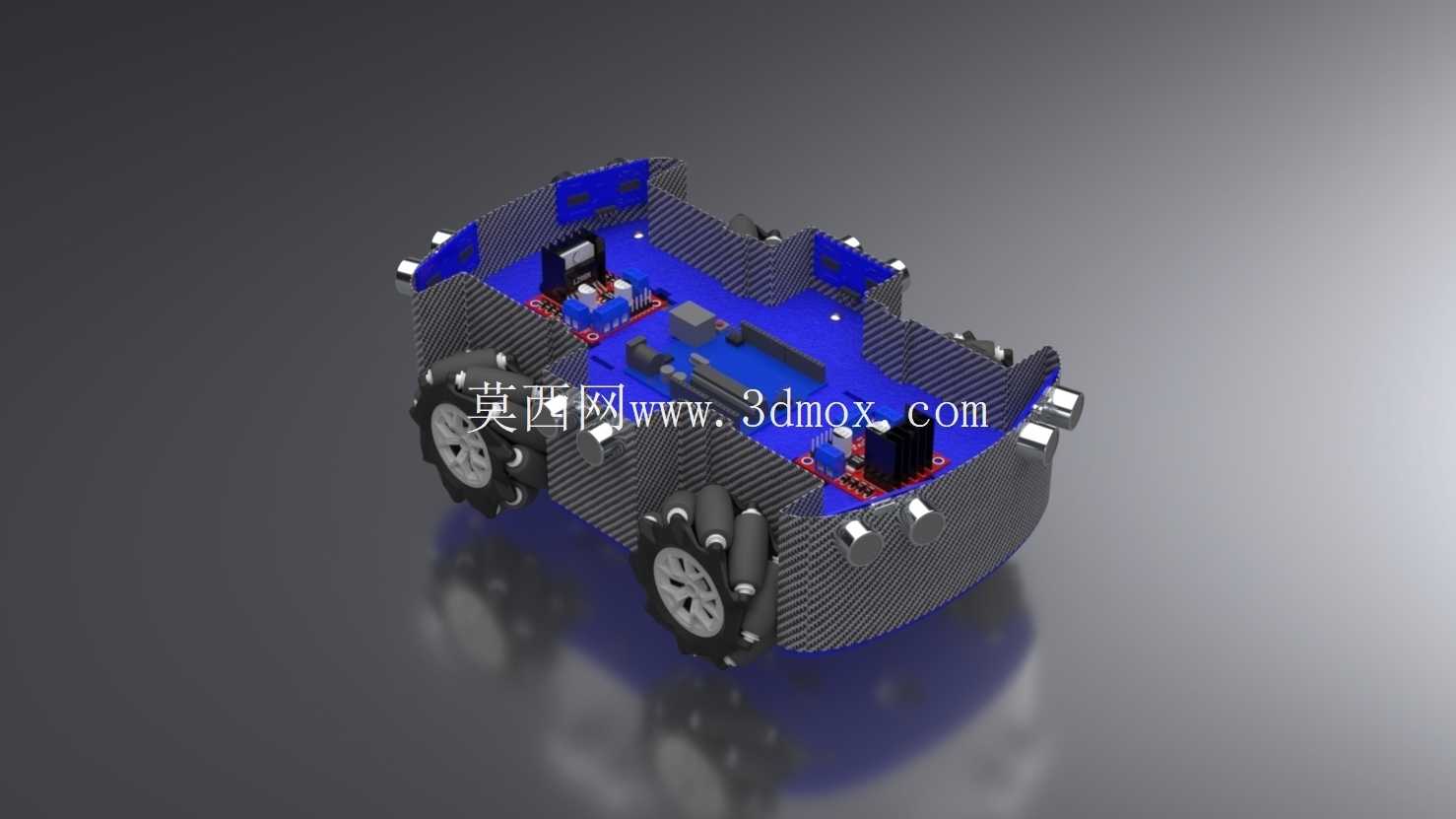

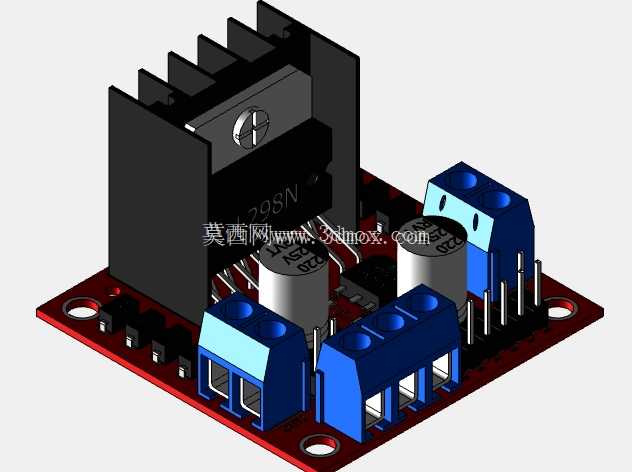
这是一个完整的SolidWorks装配体,用于搭建一个避障机器人小车的早期自主导航实验平台。该模型包含:6个用于广角检测的超声波传感器、4个直流电机、2个双电机驱动器、A??rduino微控制器、逼真的布线路径和布局合理的电子元件、以及具有精确机械结构的完全约束底盘。该设计为未来版本中自主模式的开发和测试奠定了基础。包含STEP文件和SolidWorks文件,方便编辑和导入。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,Parasolid