

��������



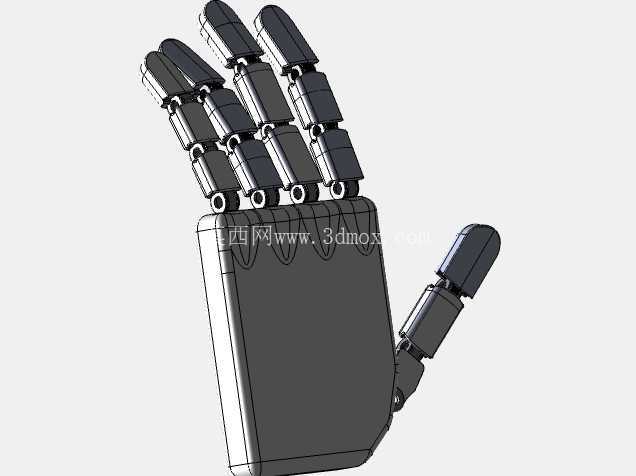




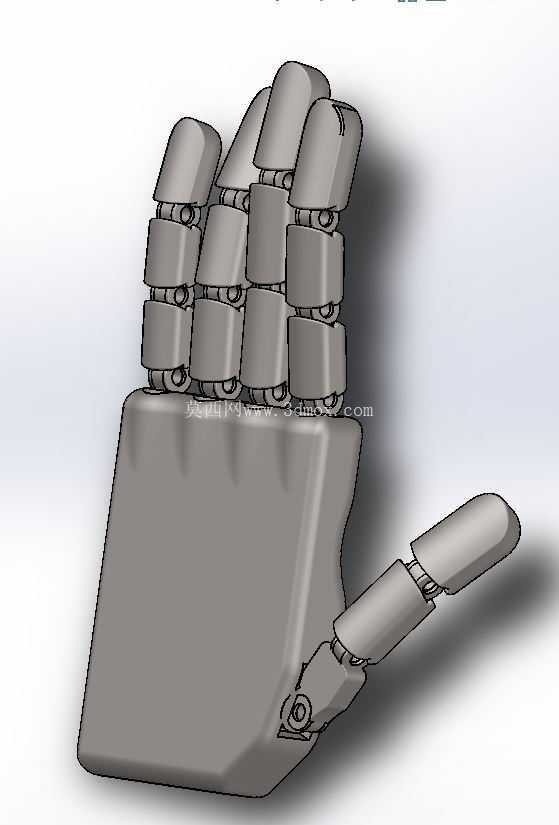

��Ȩ���� �C �����鿴/���ء�δ���������ɣ���ֹ�κ���ҵ��;������������һ���Ļ�еģ�ͣ�ּ��ģ�����ֵĻ����ṹ���˶�����������װ���ƻ��ϵĶ����ؽ���ָ����ͨ������������ʽ����ʵ����ָ�Ķ����˶�����ԭ����������ָ����������������Ϊδ����֫��������ֿ����Ļ���ģ�͡�
------�ָ���----------------------------

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��δ֪
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES,Rendering,SOLIDWORKS,STL
































