地图绘制机器人
这个项目是我工程学毕业论文的主题。我使用了GrabCAD上的组件以及我自己的解决方案。该机器人配备了麦克纳姆轮和多个传感器来实现地图构建算法。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

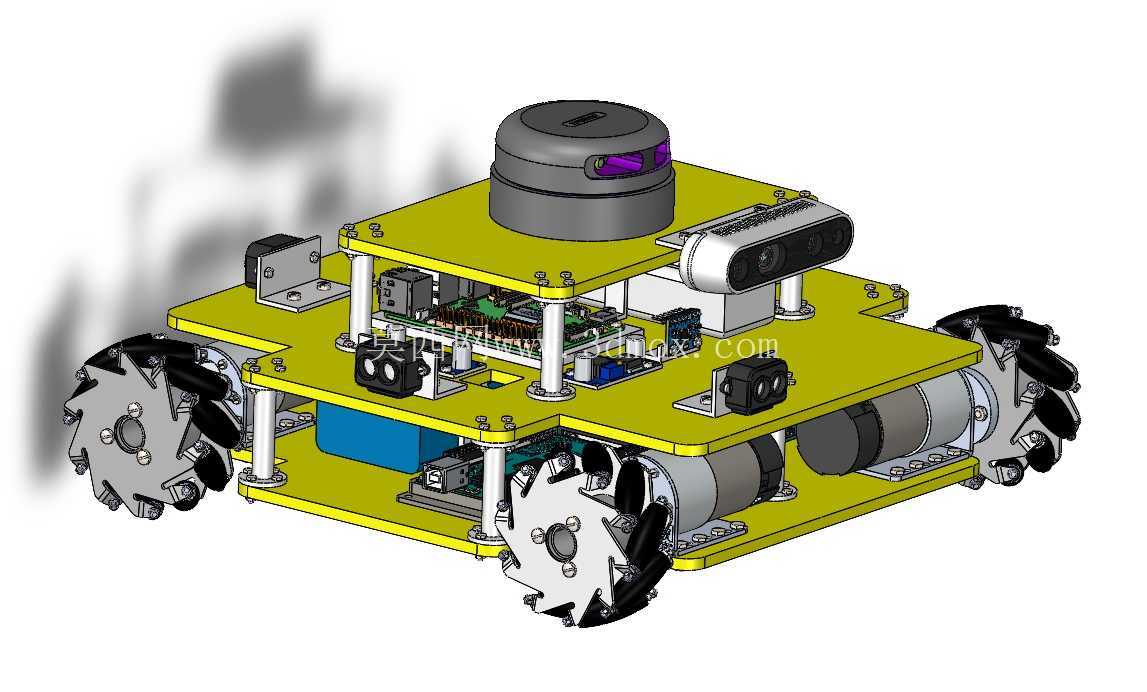
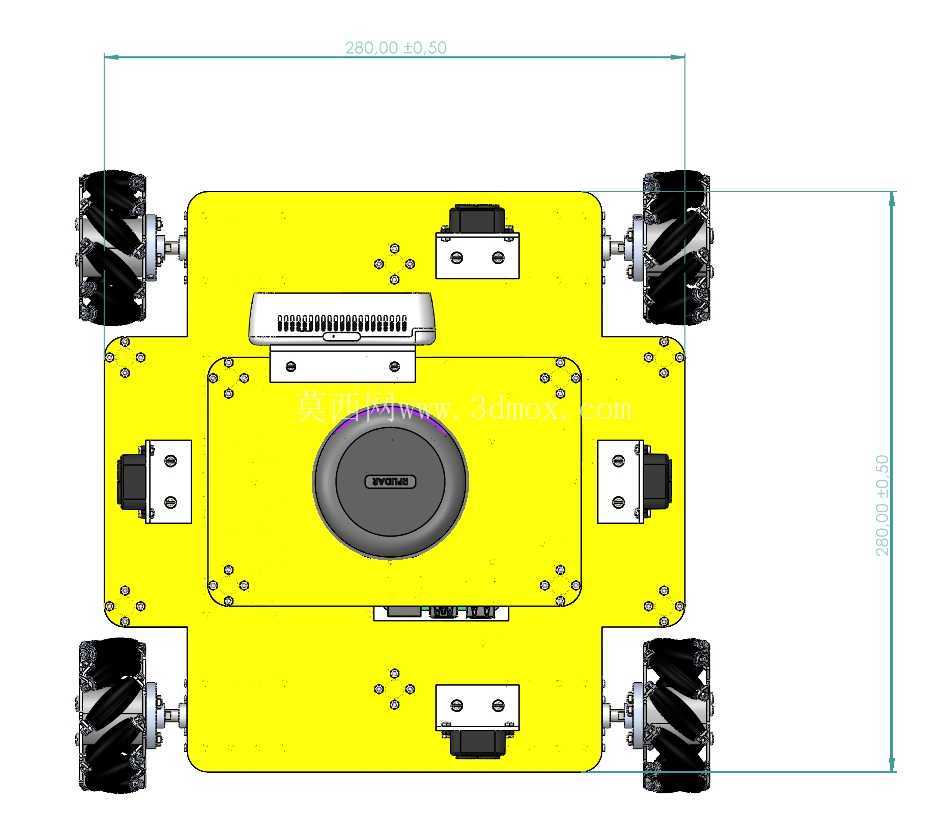
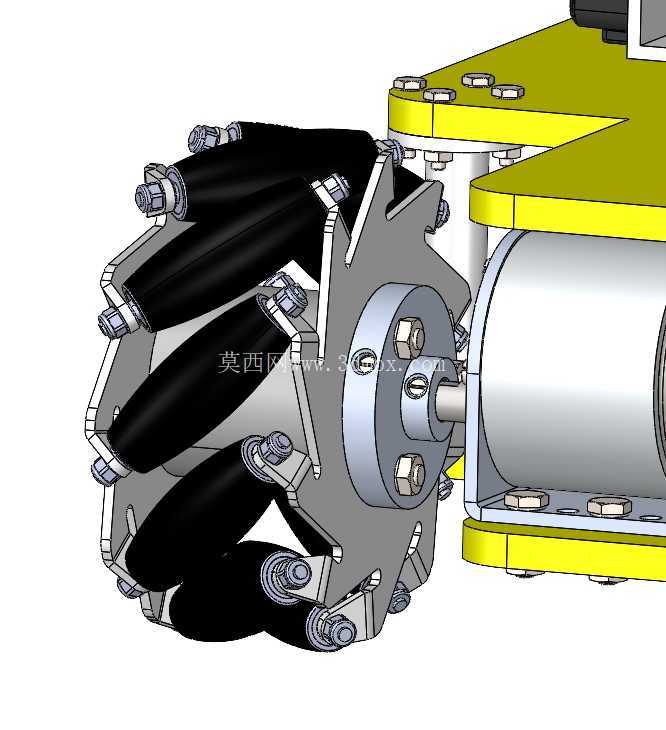
这个项目是我工程学毕业论文的主题。我使用了GrabCAD上的组件以及我自己的解决方案。该机器人配备了麦克纳姆轮和多个传感器来实现地图构建算法。