绘图机器人 SW2018,4 个伺服电机
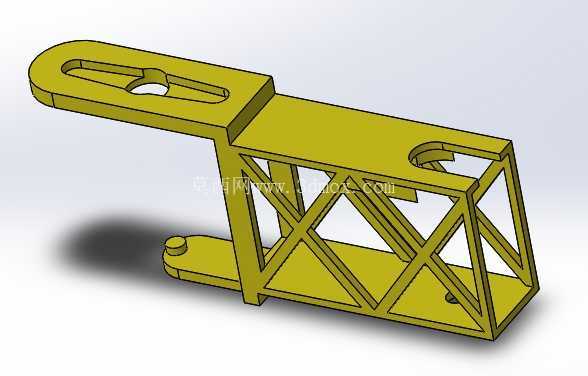
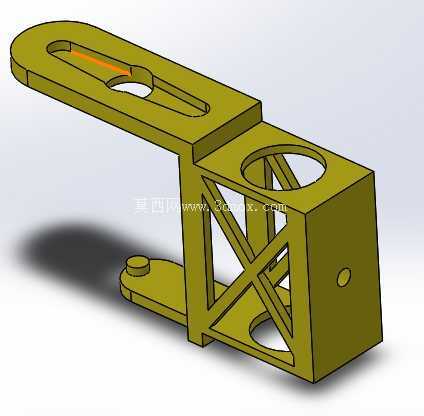
这个项目是在机器人动力学实践中精心设计的,最终将其写成帕拉布拉或图。机器人需要单独的伺服系统。在 SW2018 中使用 varias piezas hechas,编辑你的热情,在 3D 和 asi ensamblarlo 中进行编辑。在 tercerlo mas largo 中使用 3D 的各种模块 (c3g)你亲爱的,你已经获得了自由。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,SOLIDWORKS