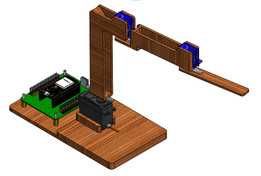
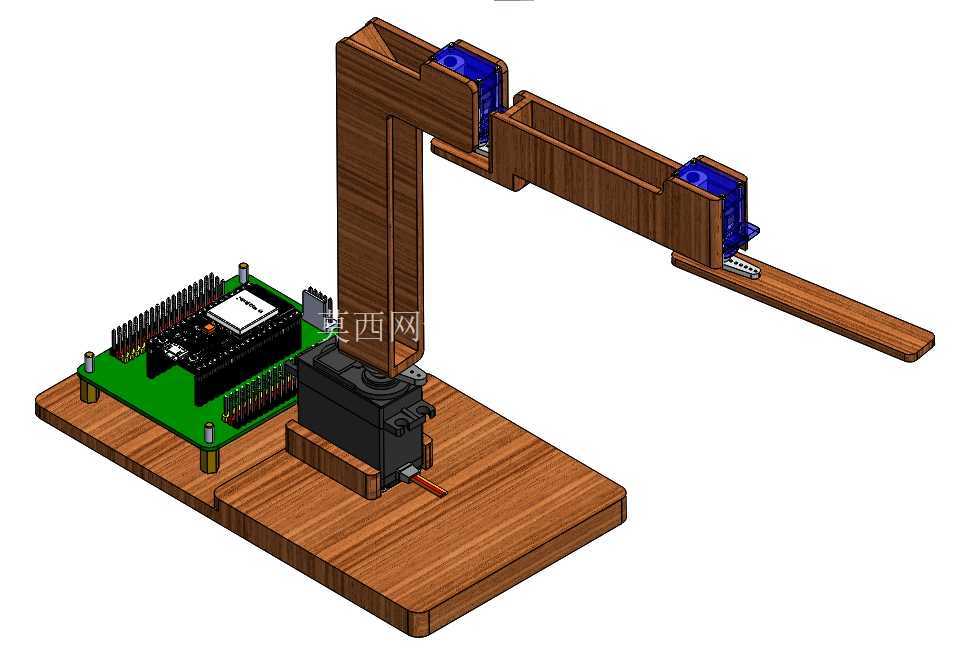
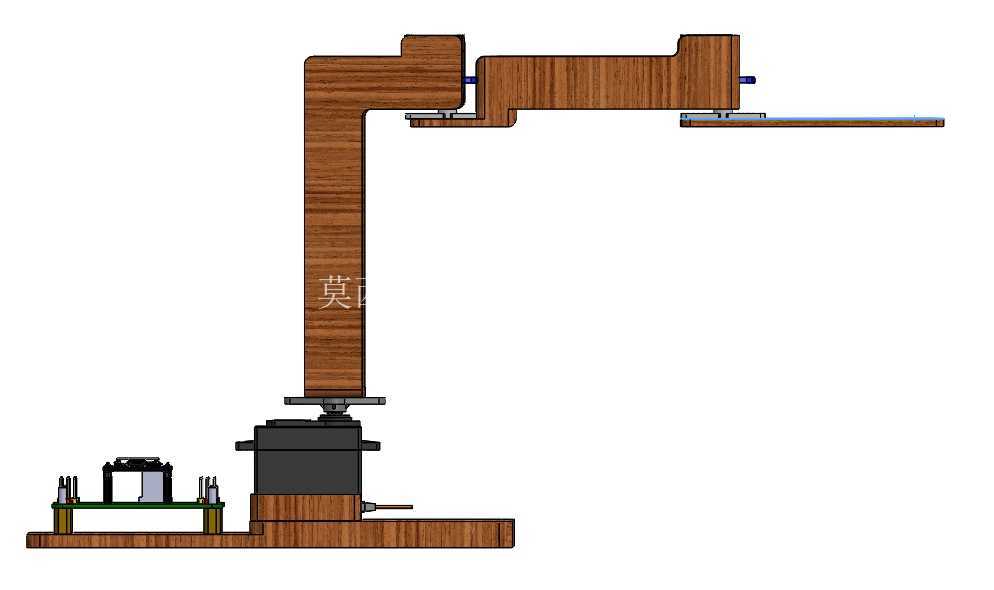
基于ESP32的机器人平面3R控制
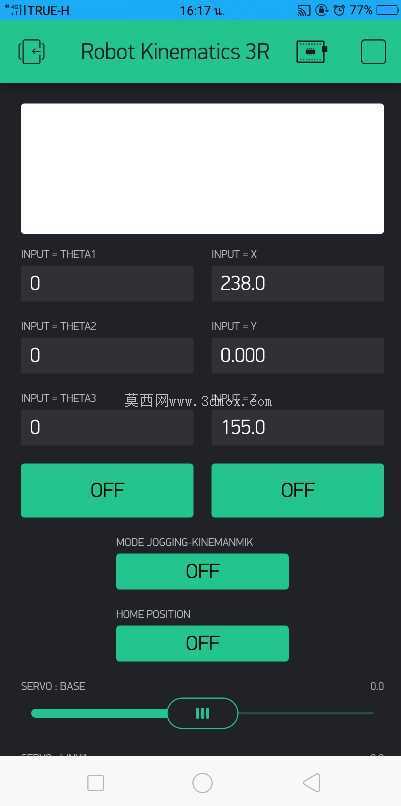
Blynk 应用控制和显示数值。ESP32 控制 RC 伺服电机。RC 伺服电机用于 3 个关节的机器人。请联系我们。控制方式包括正向运动学、逆向运动学和轨迹规划。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Other,STEP / IGES,Rendering


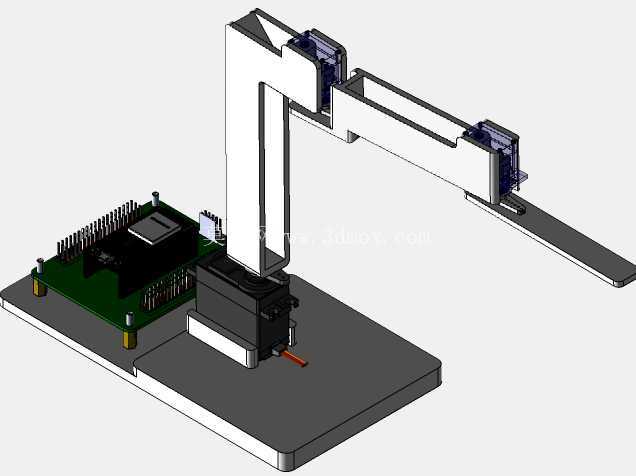
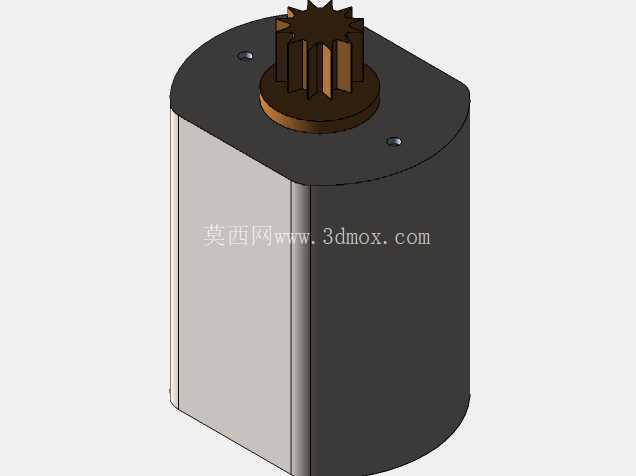



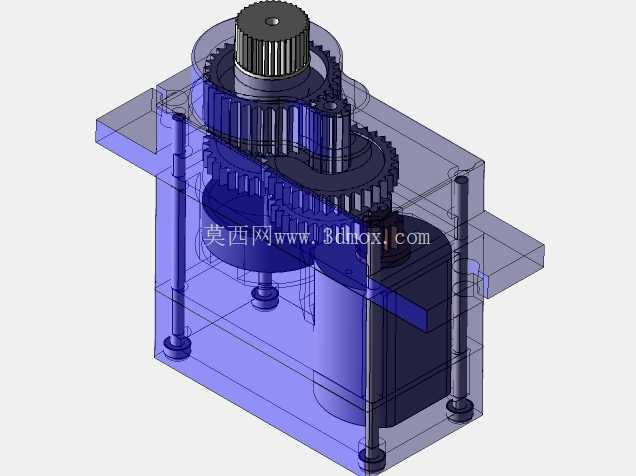




Blynk 应用控制和显示数值。ESP32 控制 RC 伺服电机。RC 伺服电机用于 3 个关节的机器人。请联系我们。控制方式包括正向运动学、逆向运动学和轨迹规划。