极坐标配置
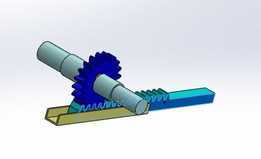
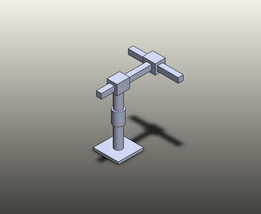
极轴构型是常见的机器人构型之一。极轴构型具有一个相对于本体运动的滑动臂(L关节),并且可以绕水平轴(R关节)和垂直轴(T关节)旋转。符号:TRL
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering







极轴构型是常见的机器人构型之一。极轴构型具有一个相对于本体运动的滑动臂(L关节),并且可以绕水平轴(R关节)和垂直轴(T关节)旋转。符号:TRL