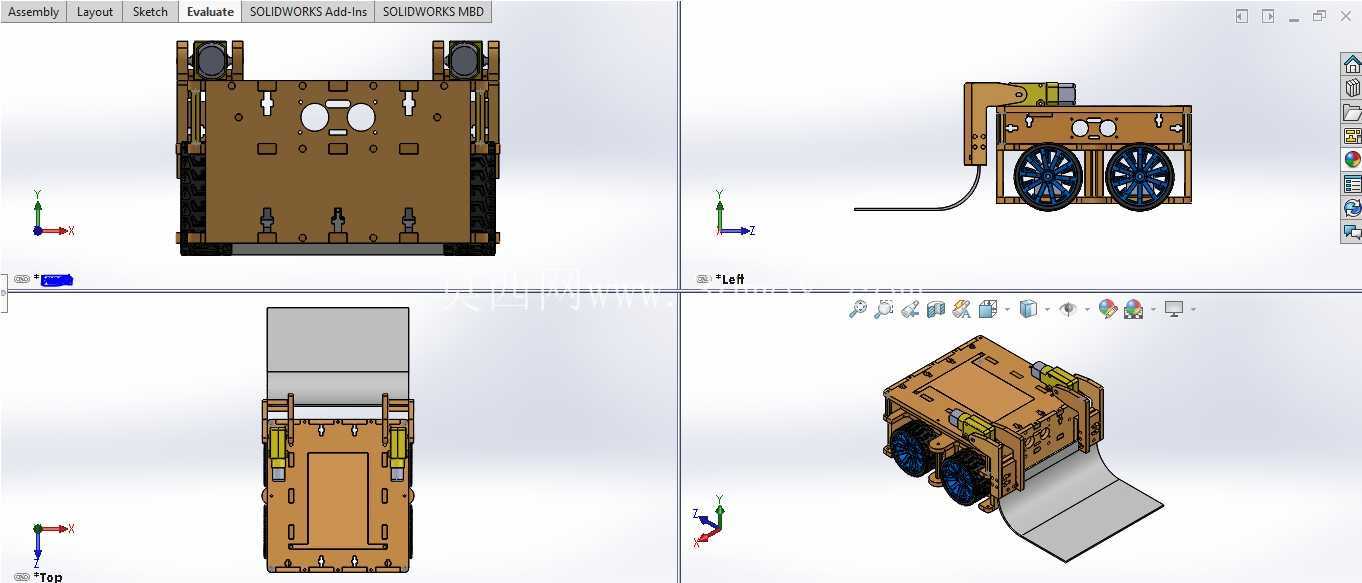
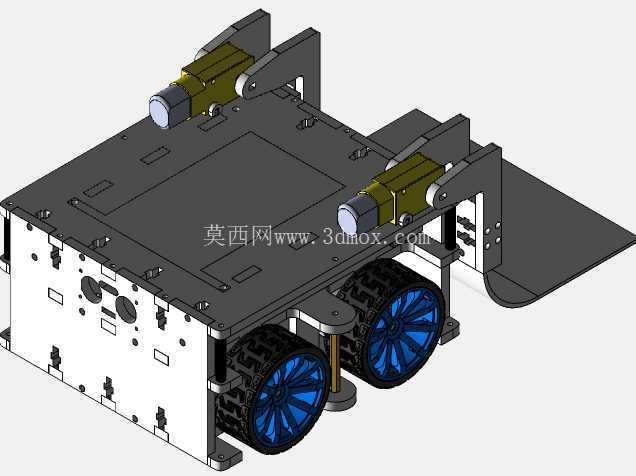
相扑机器人
这是一个利用轮子与地面摩擦力、电机转速和巧妙滑行来击败对手的机器人。它并非完全由我设计,我从 GrabCad 借用了一些零件,但我真的记不清是谁的了,对此我深感抱歉。如果您想要这些设计零件,请在评论中留下您的邮箱地址,我会发送给您。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

这是一个利用轮子与地面摩擦力、电机转速和巧妙滑行来击败对手的机器人。它并非完全由我设计,我从 GrabCad 借用了一些零件,但我真的记不清是谁的了,对此我深感抱歉。如果您想要这些设计零件,请在评论中留下您的邮箱地址,我会发送给您。