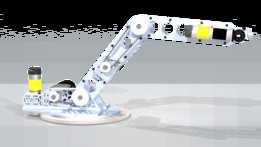
5自由度机械臂
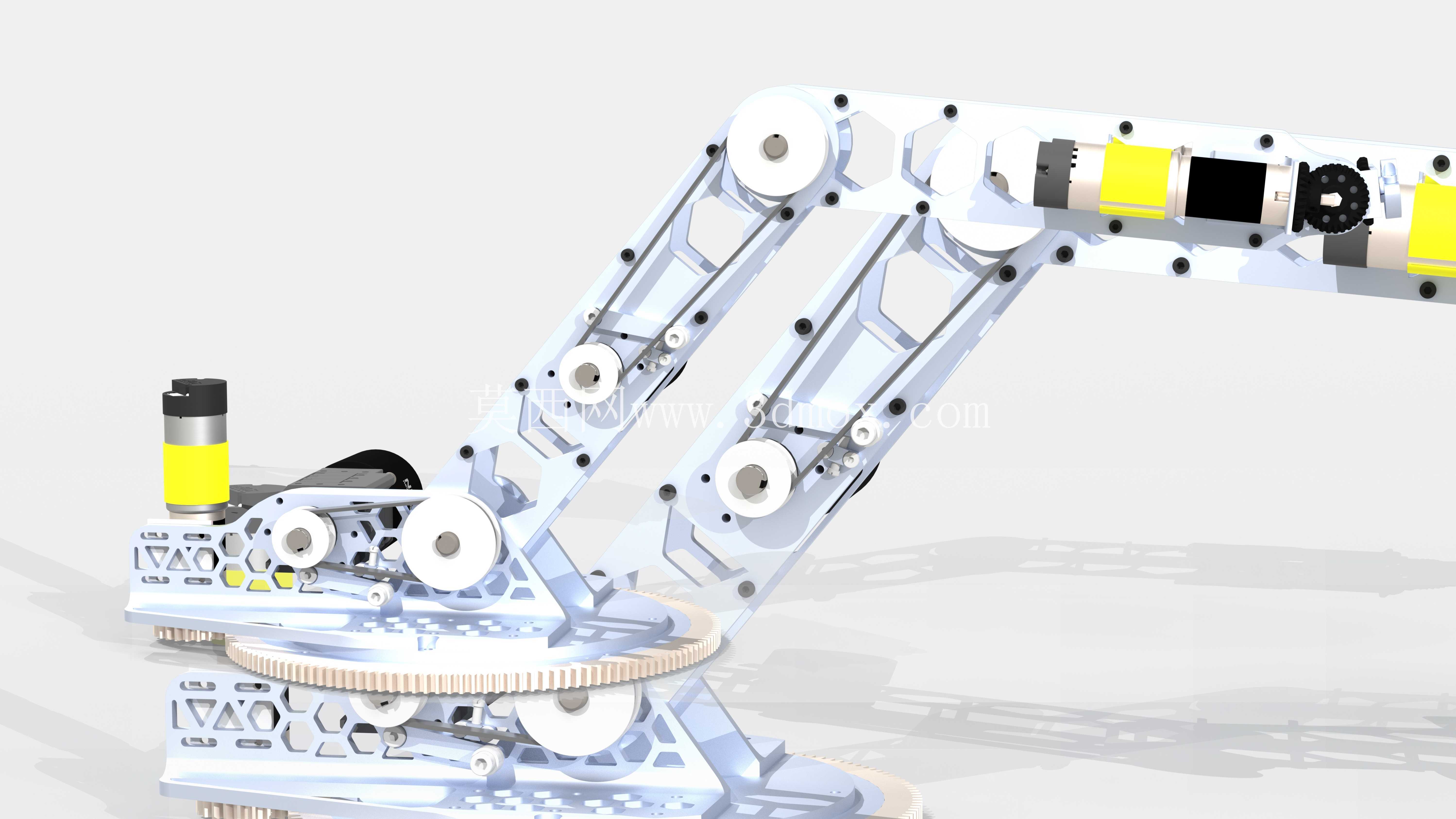

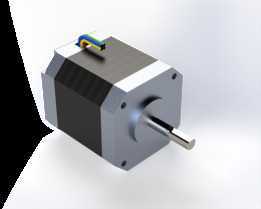
这是我设计的一款五自由度机械臂。它采用动力强劲的NEO电机驱动肩关节和肘关节,并使用有刷直流电机驱动差动腕关节和转盘关节。此外,它还使用了一个廉价的现成旋转轴承作为回转轴承。零件来自以下渠道:- https://www.servocity.com/- https://www.revrobotics.com/- https://www.mcmaster.com/
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,STEP / IGES