通用机器人抓取扭转器
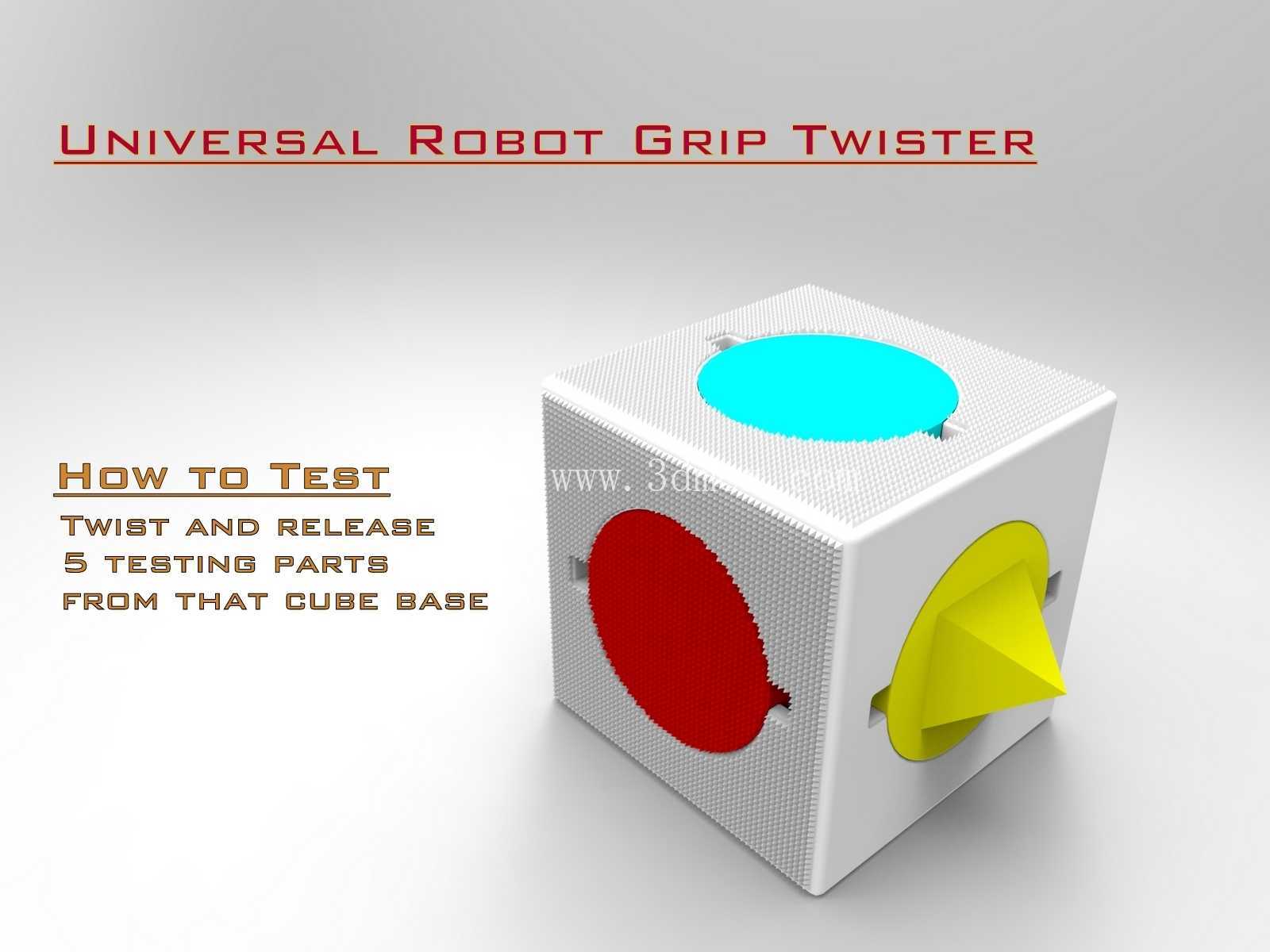
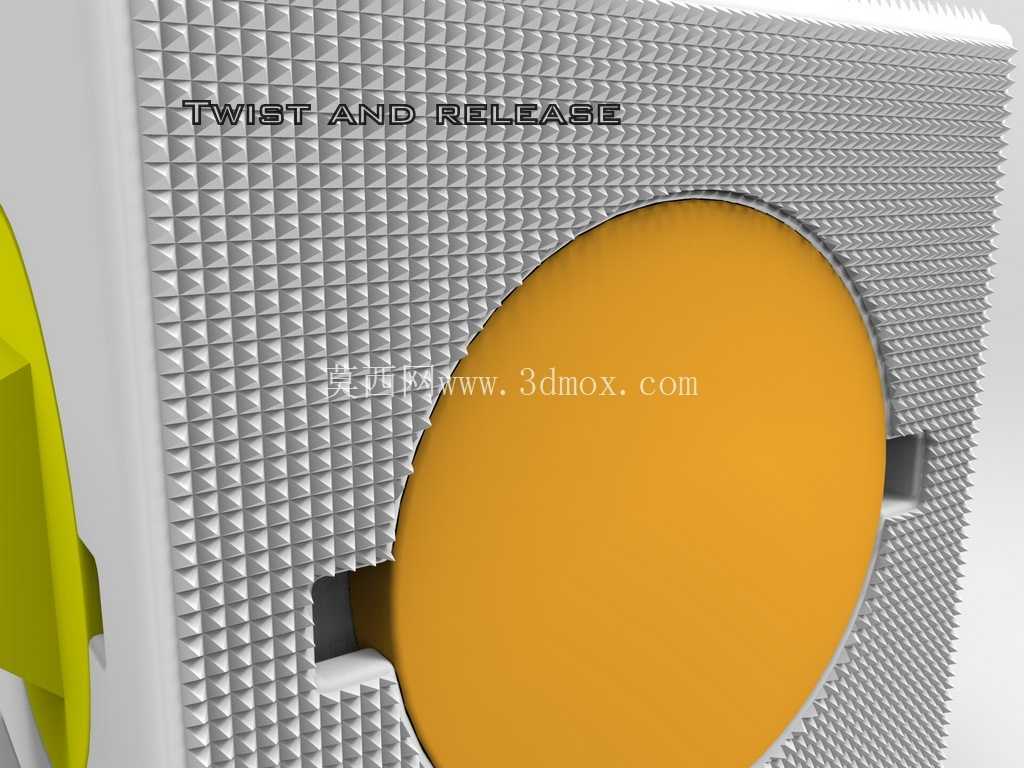
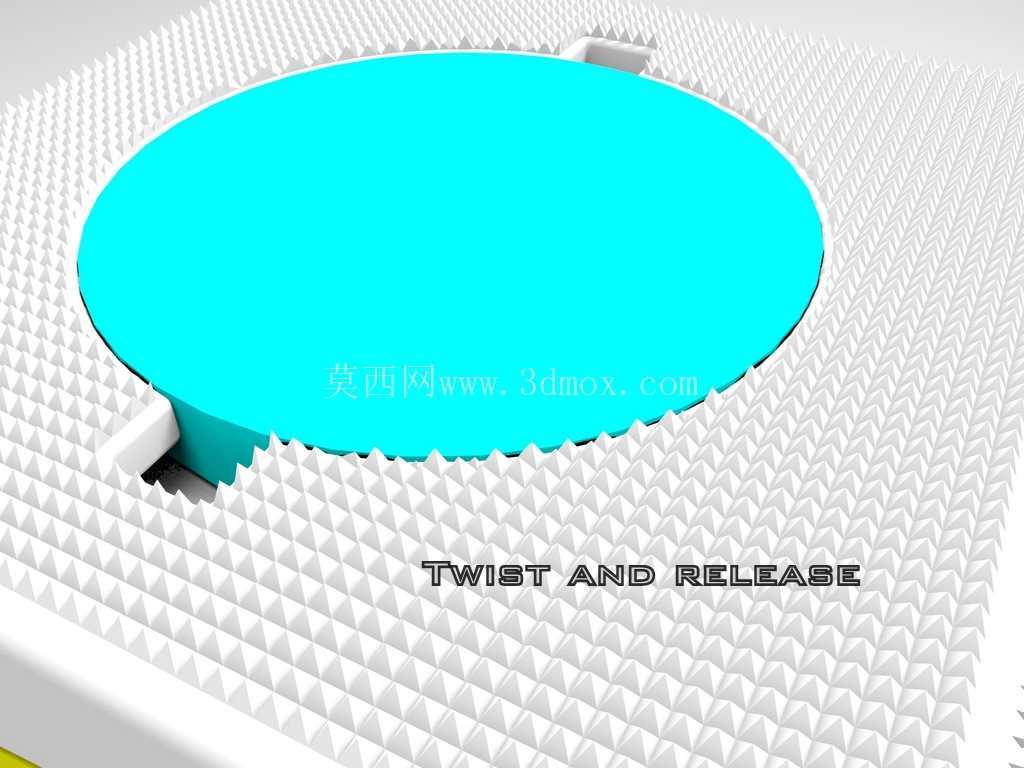
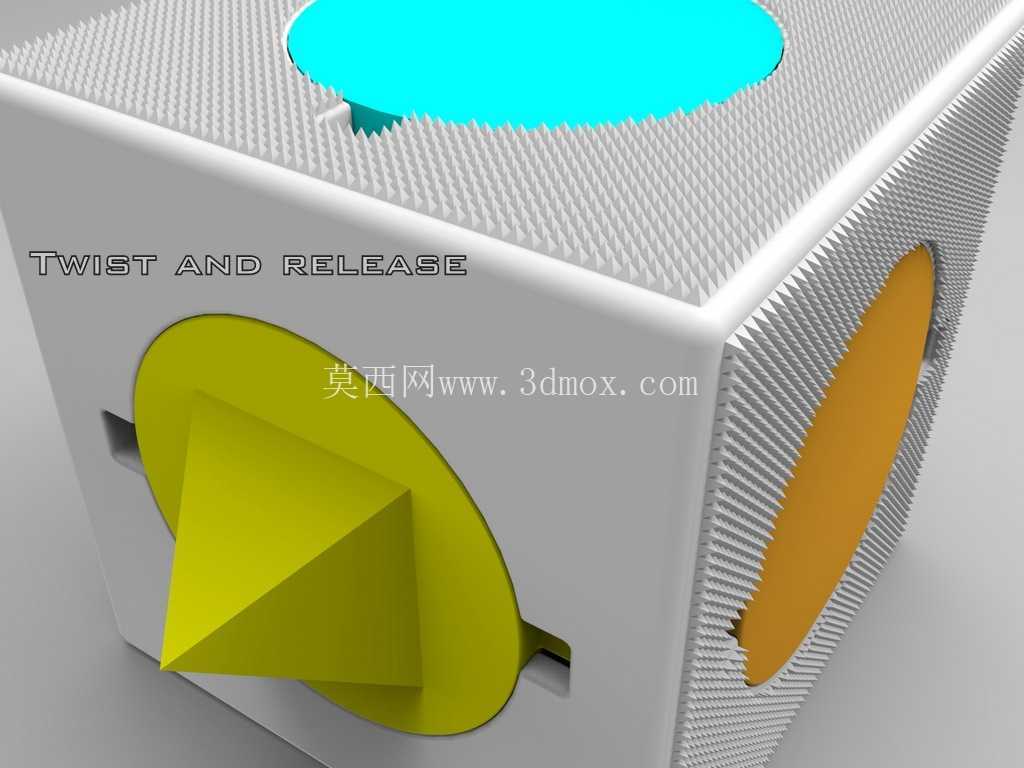
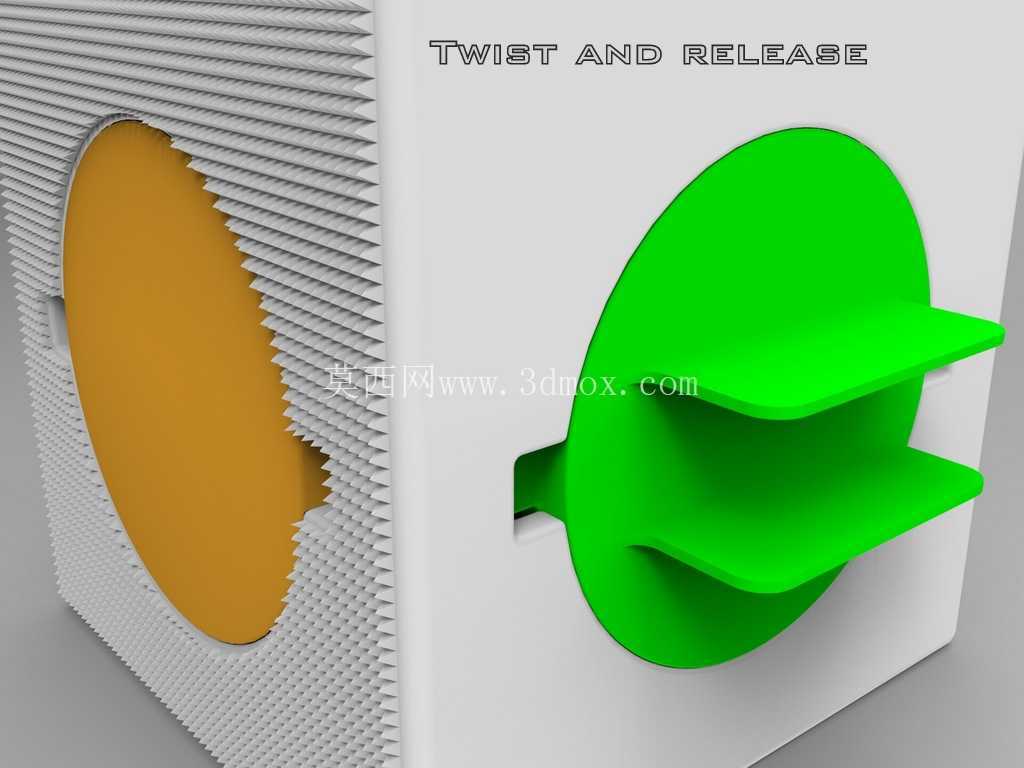
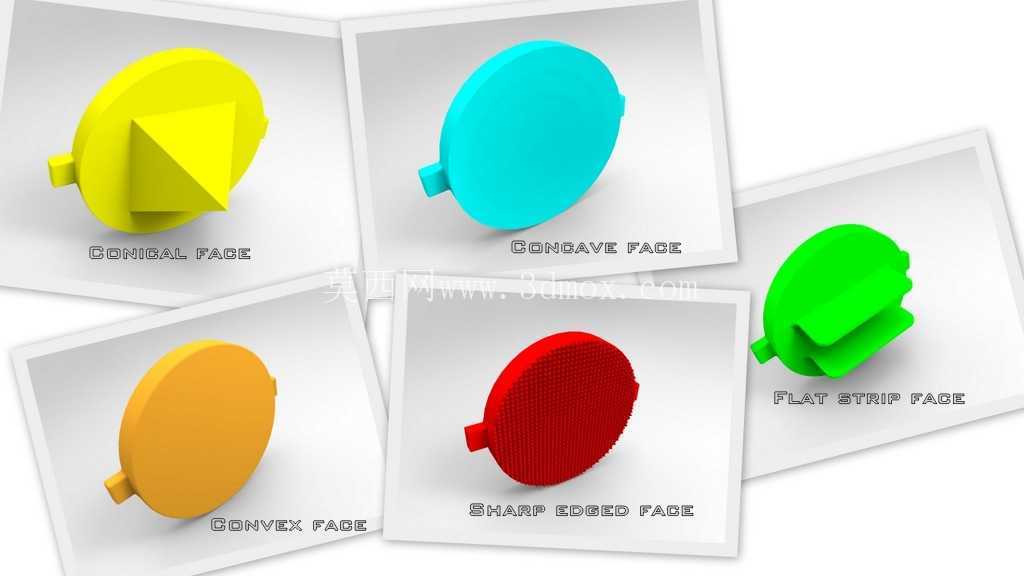
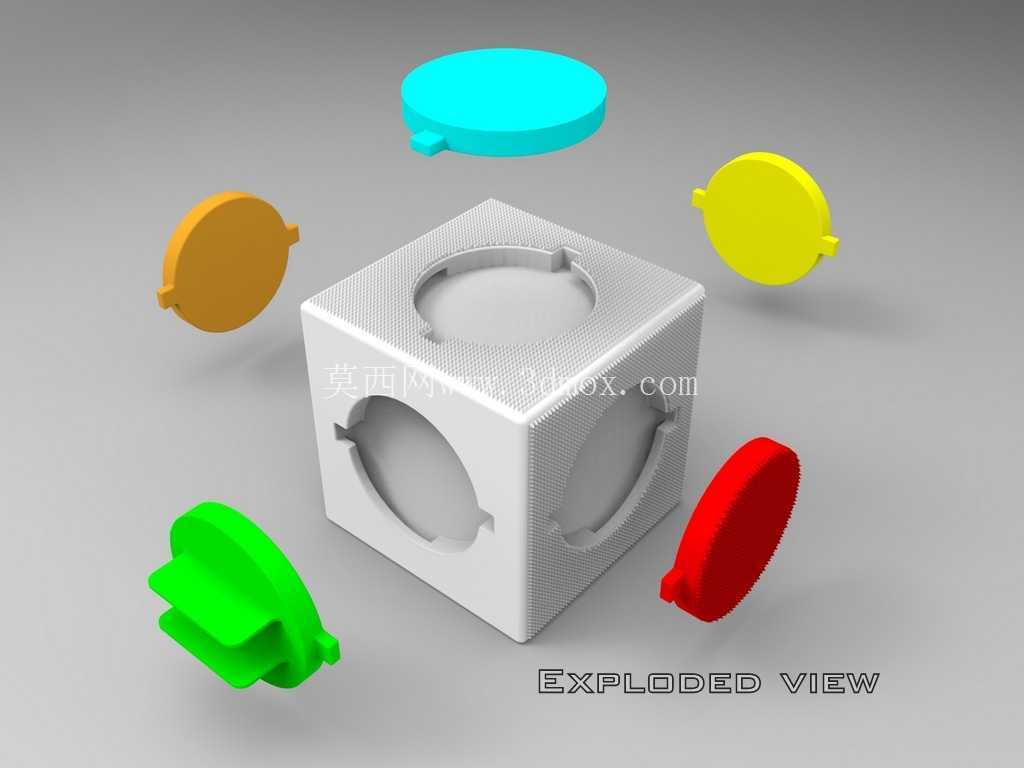
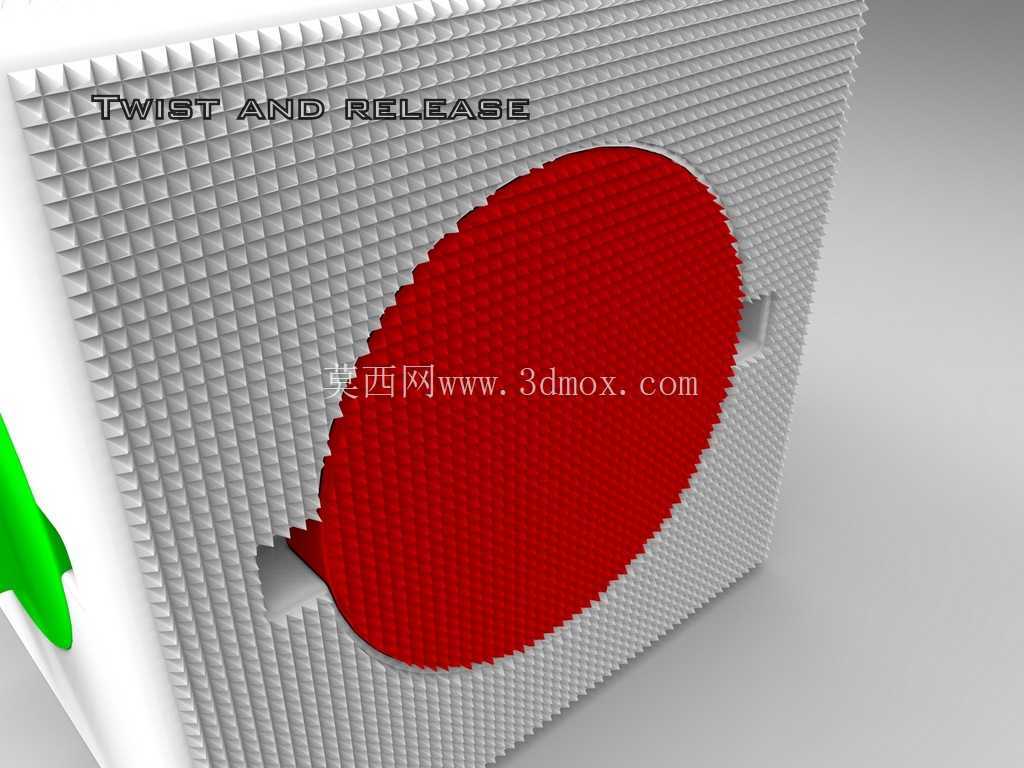
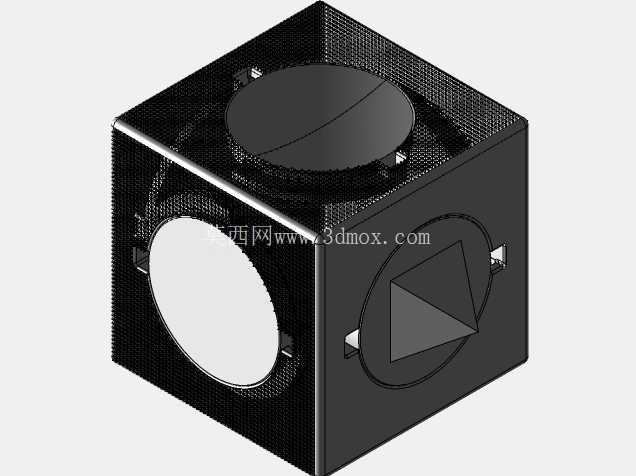
我们可以使用这款简单的测试对象“通用机器人抓取扭转器或测试器”来测试机器人的抓取能力。我认为大多数机器人夹爪都具备抓取、拿起、锁定、保持、旋转等功能,并且能够抓取形状各异的物体。但它们大多缺乏集中抓取和灵敏抓取的能力。通过使用这款测试对象,我们可以测试机器人的各种能力。使用方法:扭转并释放――这是所有机器人夹爪的测试流程。该测试对象包含五个待测部件,如下所示:尖锐边缘面、扁平条状面、圆锥形面、凸面和凹面。为了测试抓取力的集中性,我们可以使用尖锐边缘面,因为在扭转该部件时,夹爪应该只专注于抓取物体。否则就无法做到,因为外表面也有锋利的边缘。在扭转扁平条带、凹面和凸面夹爪时,必须了解旋转时的灵敏度,否则在物体旋转90度后夹爪就会断裂。锥形面和扁平条带用于测试夹爪的抓取能力。扭转时,夹爪能够抓取、集中、灵敏地保持、夹持等。我们可以使用3D打印技术制作这些物体。感谢观看,Ajin Ghosh。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Rendering,Other