蛇形坦克机器人设计
本项目介绍了一种专为震后搜救任务开发的模块化救援机器人的机械设计。该机器人结合了蛇形柔性体和履带式(坦克式)移动系统,能够在狭窄且充满瓦砾的空间中穿梭。它能够克服高达30厘米的障碍物,并实时传输热成像和视频数据,为救援队提供支持。这种混合设计提高了机器人的机动性、耐用性和环境适应性,使其非常适合在灾区执行生命救援任务。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

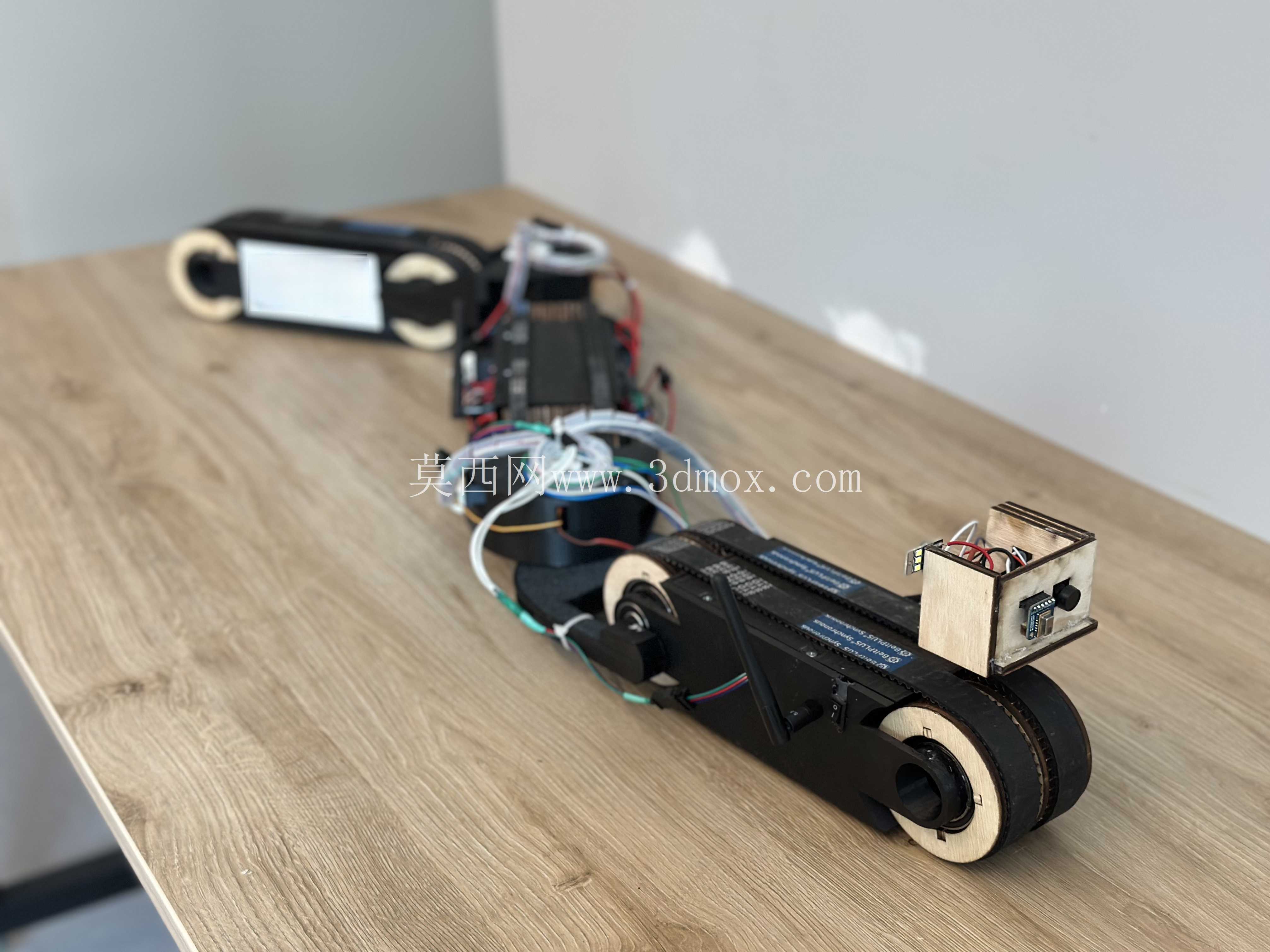
本项目介绍了一种专为震后搜救任务开发的模块化救援机器人的机械设计。该机器人结合了蛇形柔性体和履带式(坦克式)移动系统,能够在狭窄且充满瓦砾的空间中穿梭。它能够克服高达30厘米的障碍物,并实时传输热成像和视频数据,为救援队提供支持。这种混合设计提高了机器人的机动性、耐用性和环境适应性,使其非常适合在灾区执行生命救援任务。