库珀 - 四足机器人(机器狗)
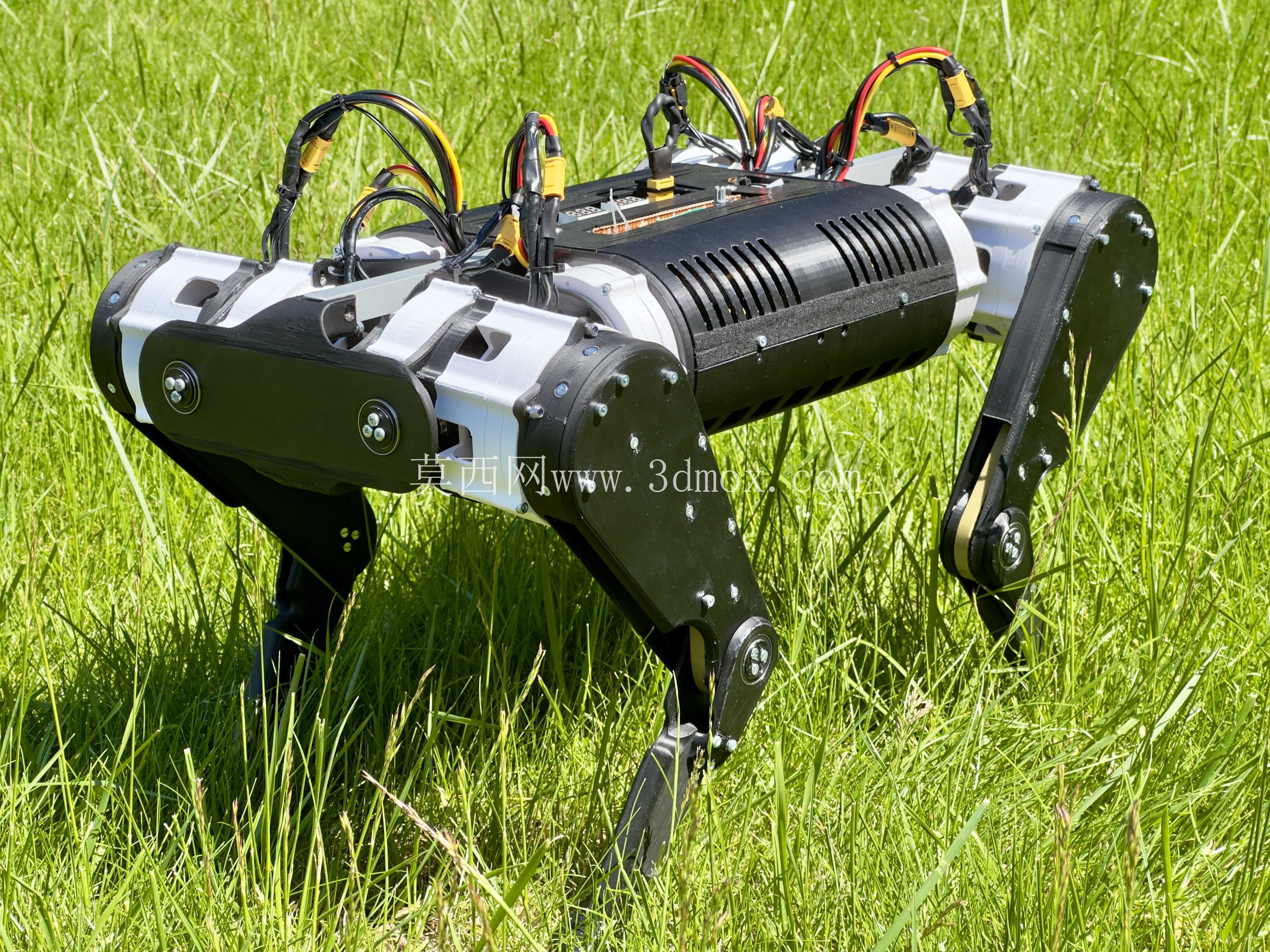

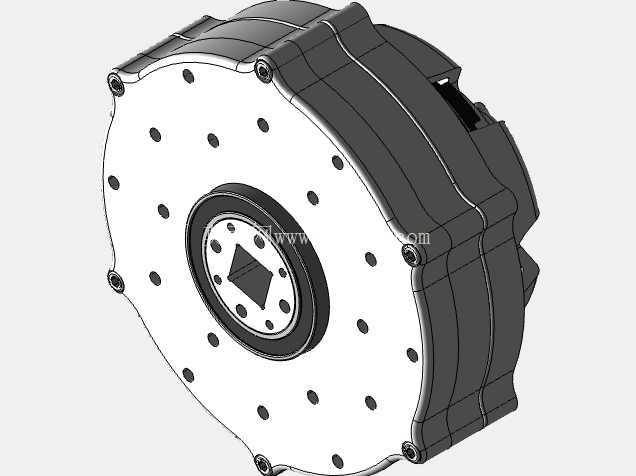
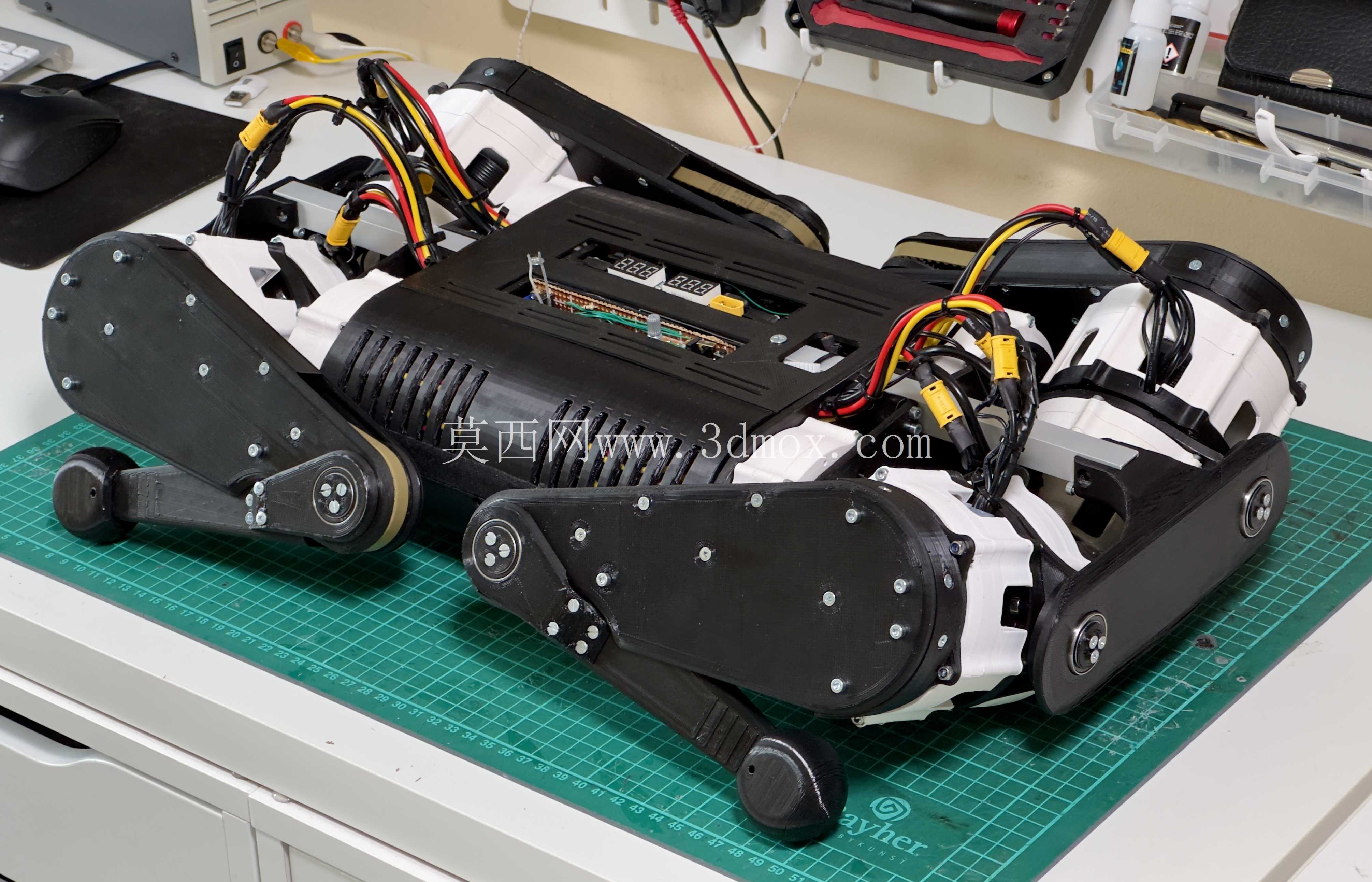
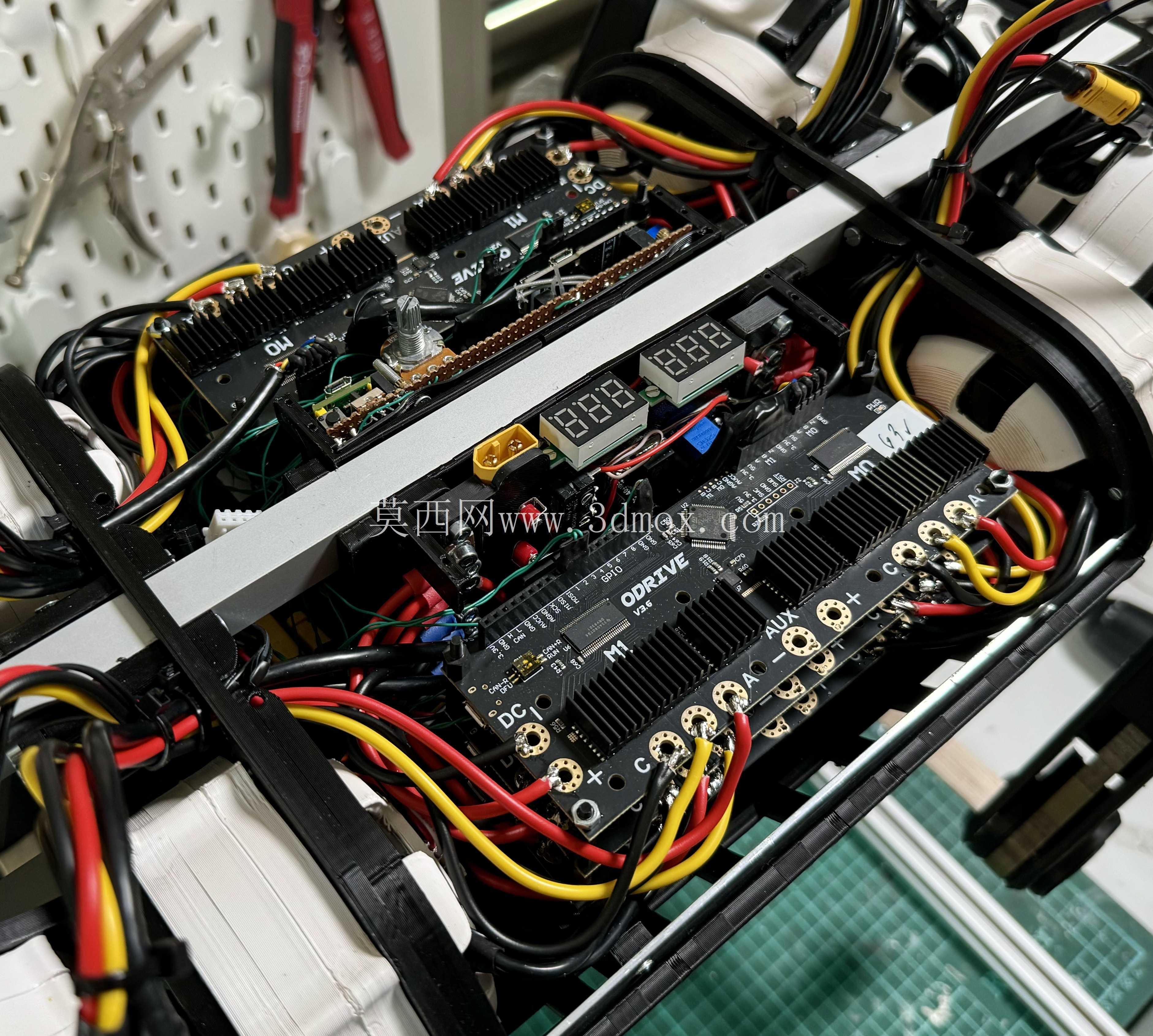

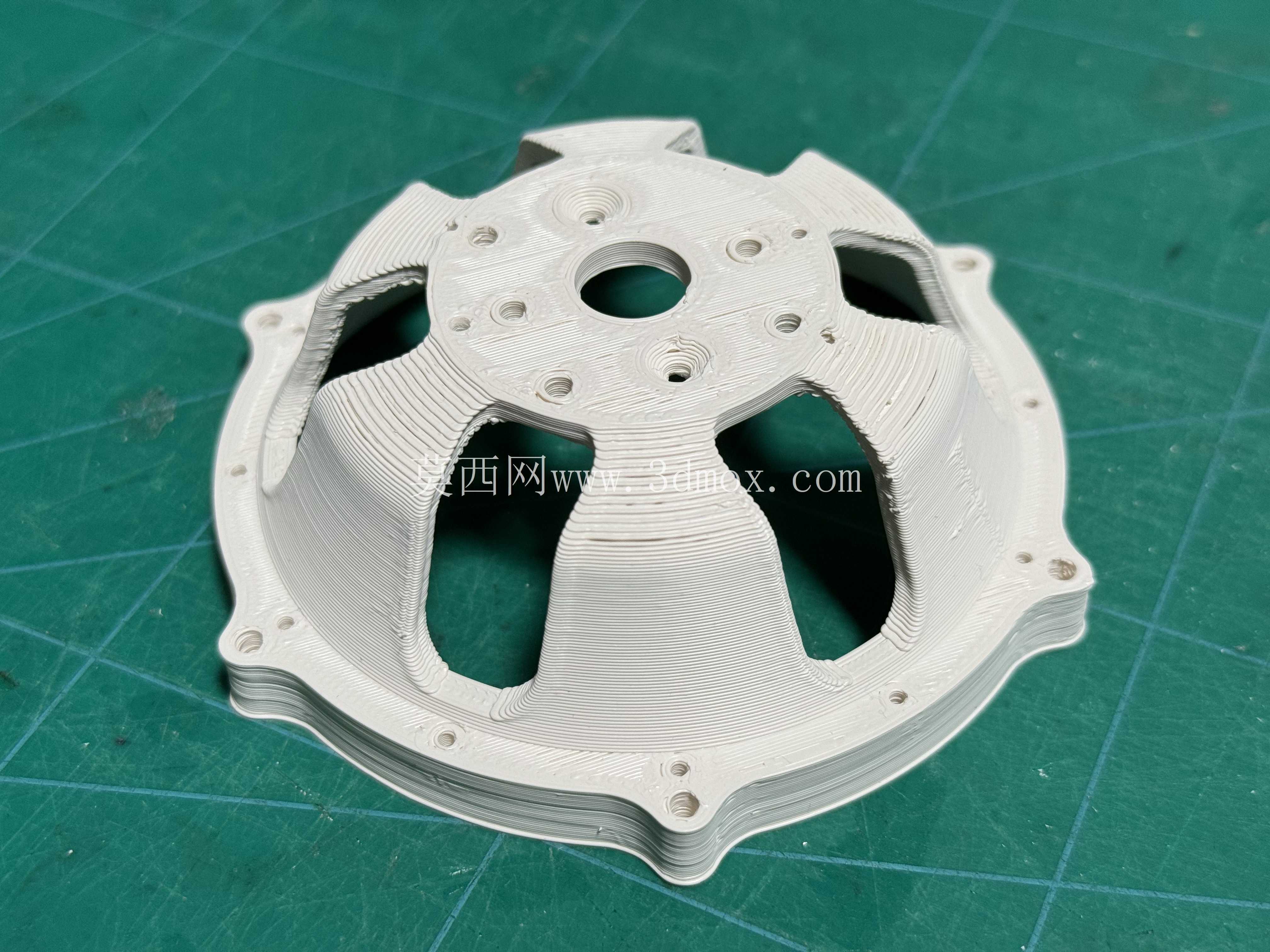
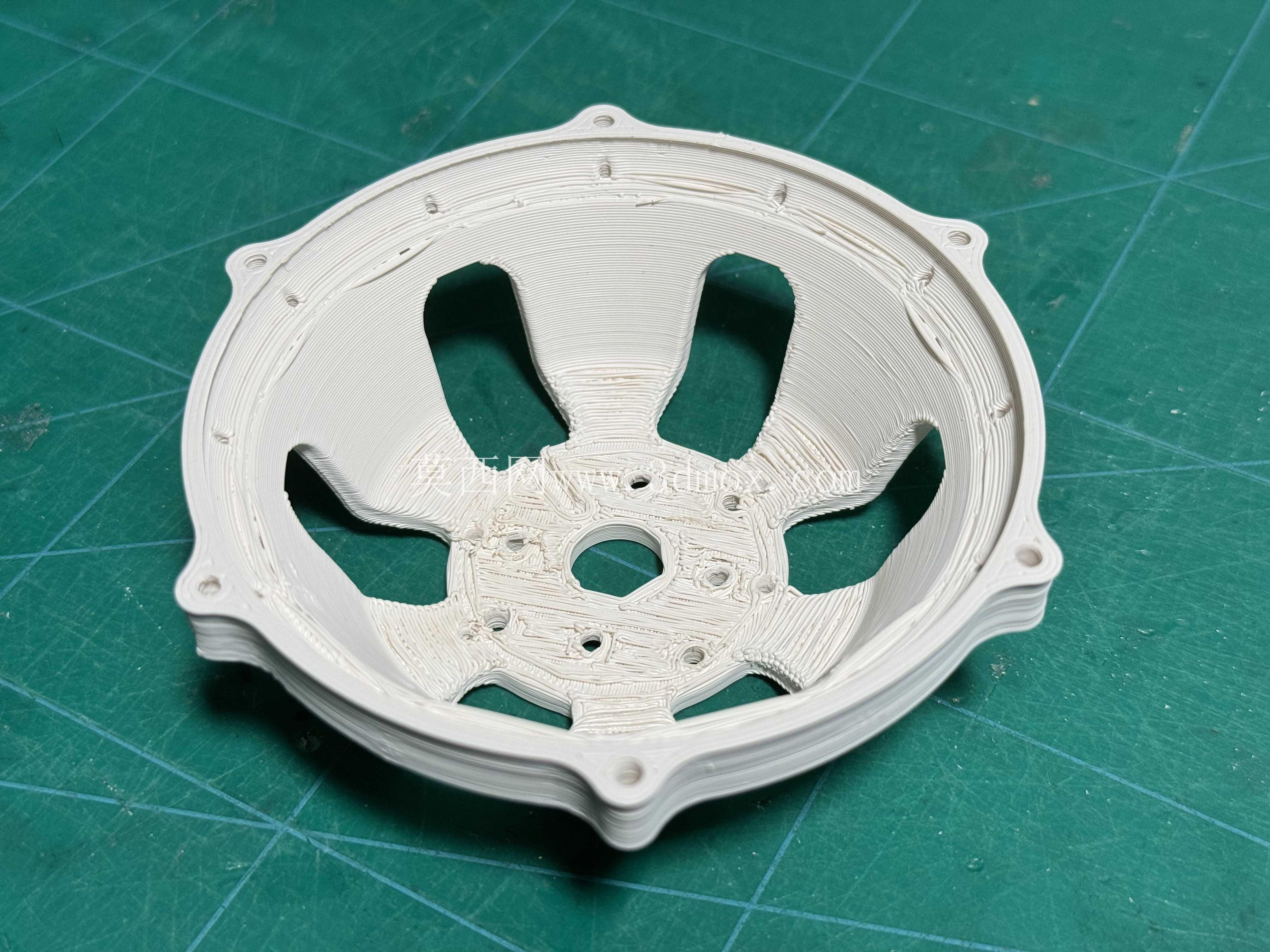
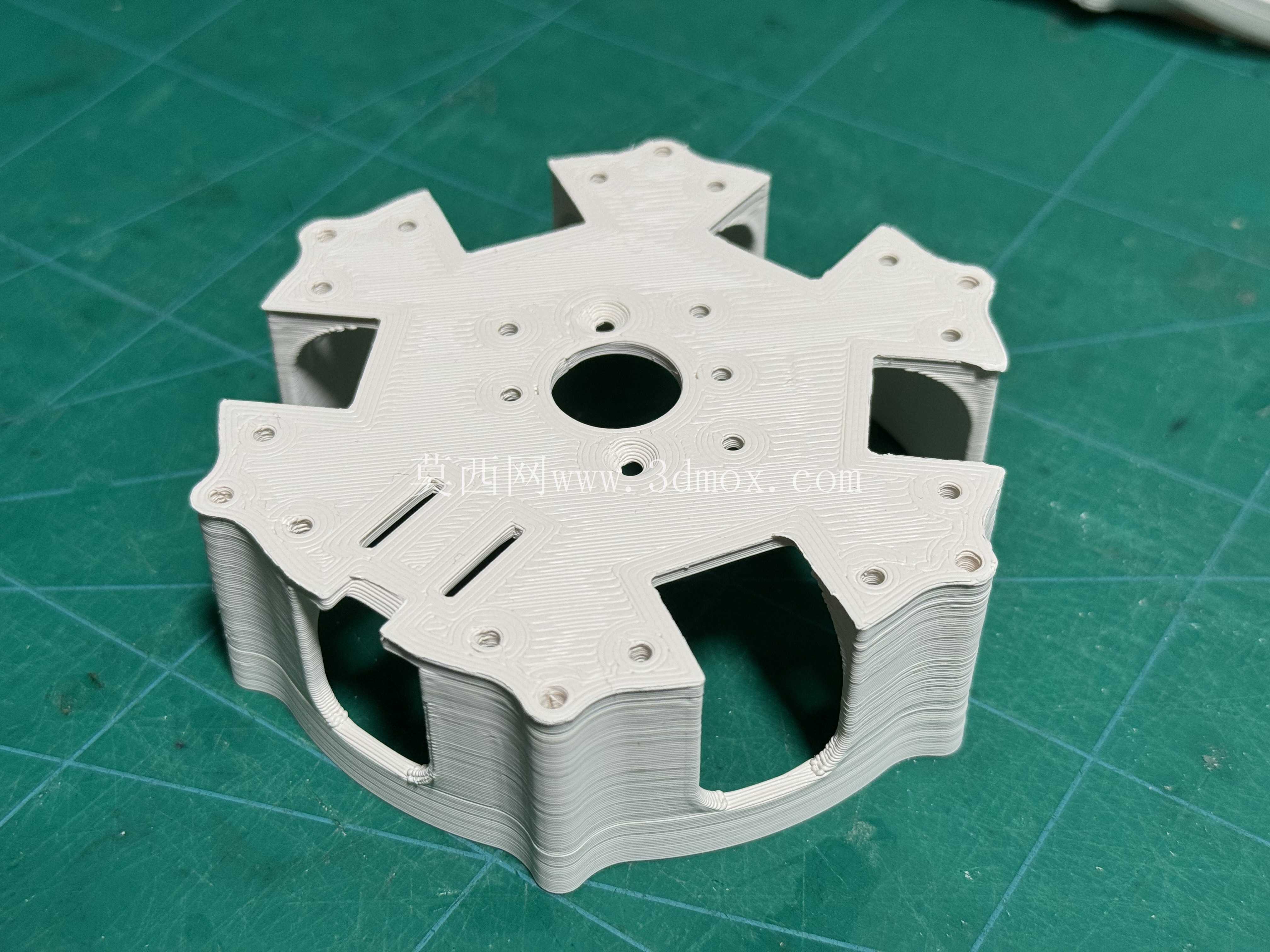
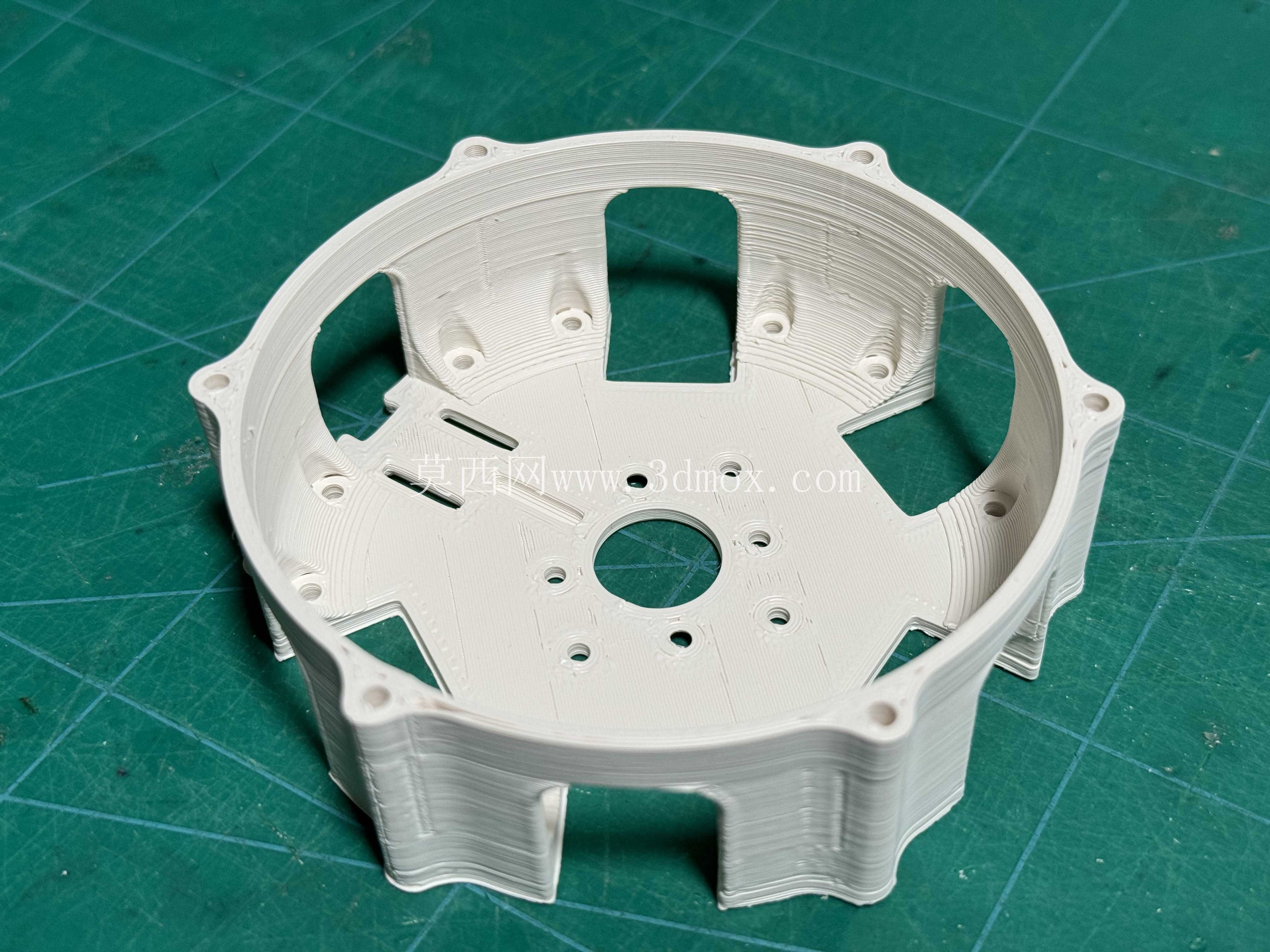

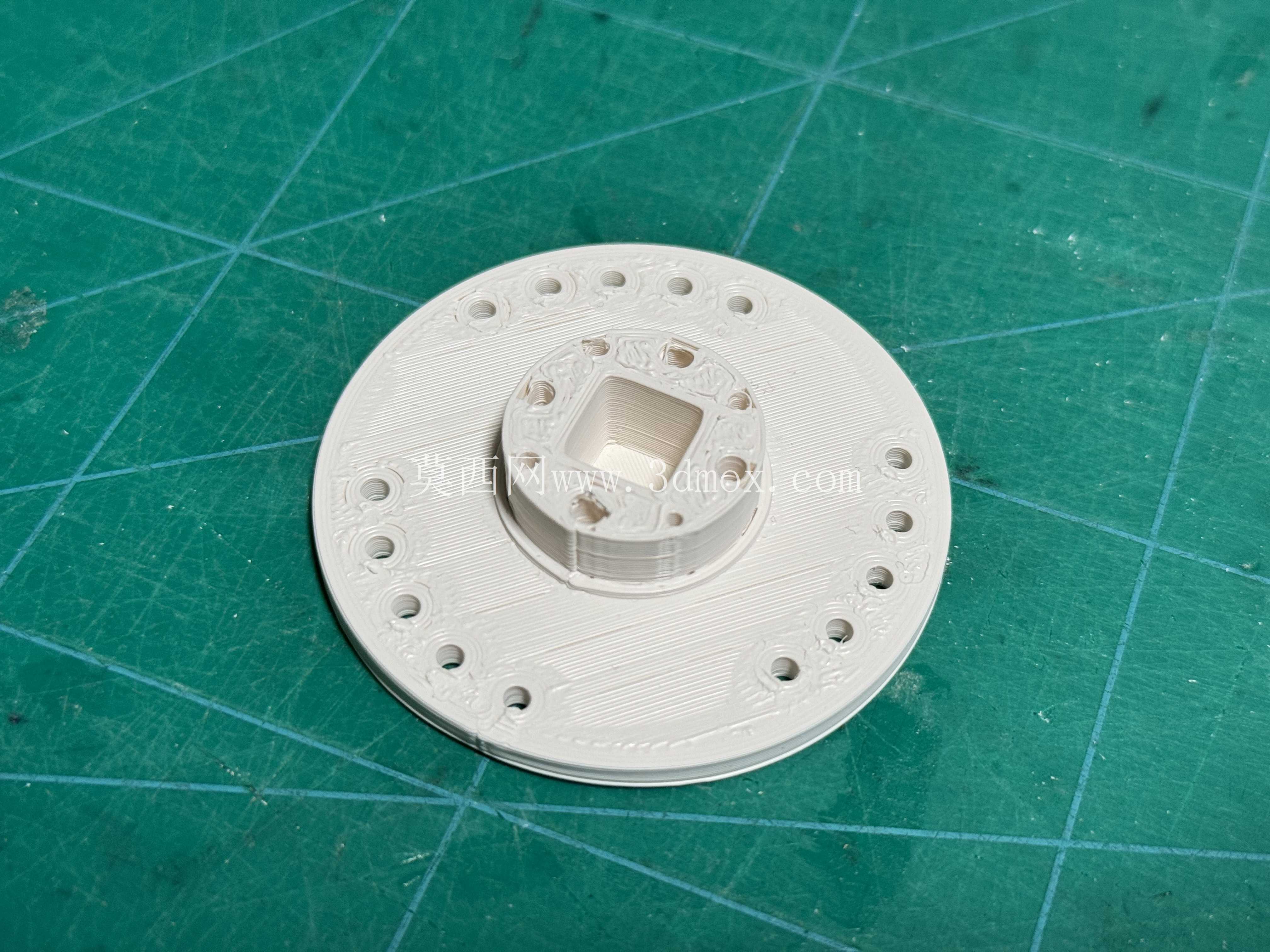
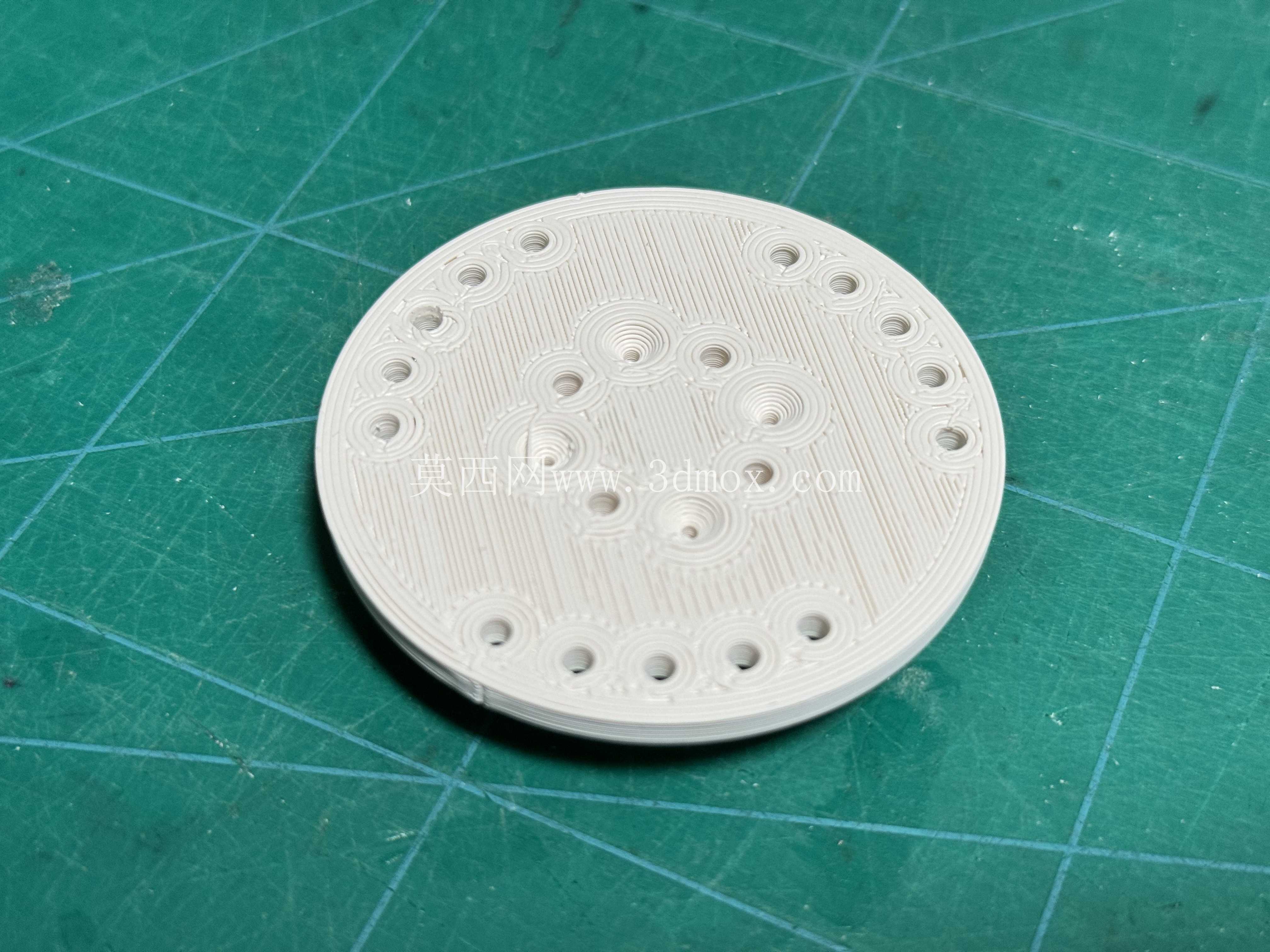

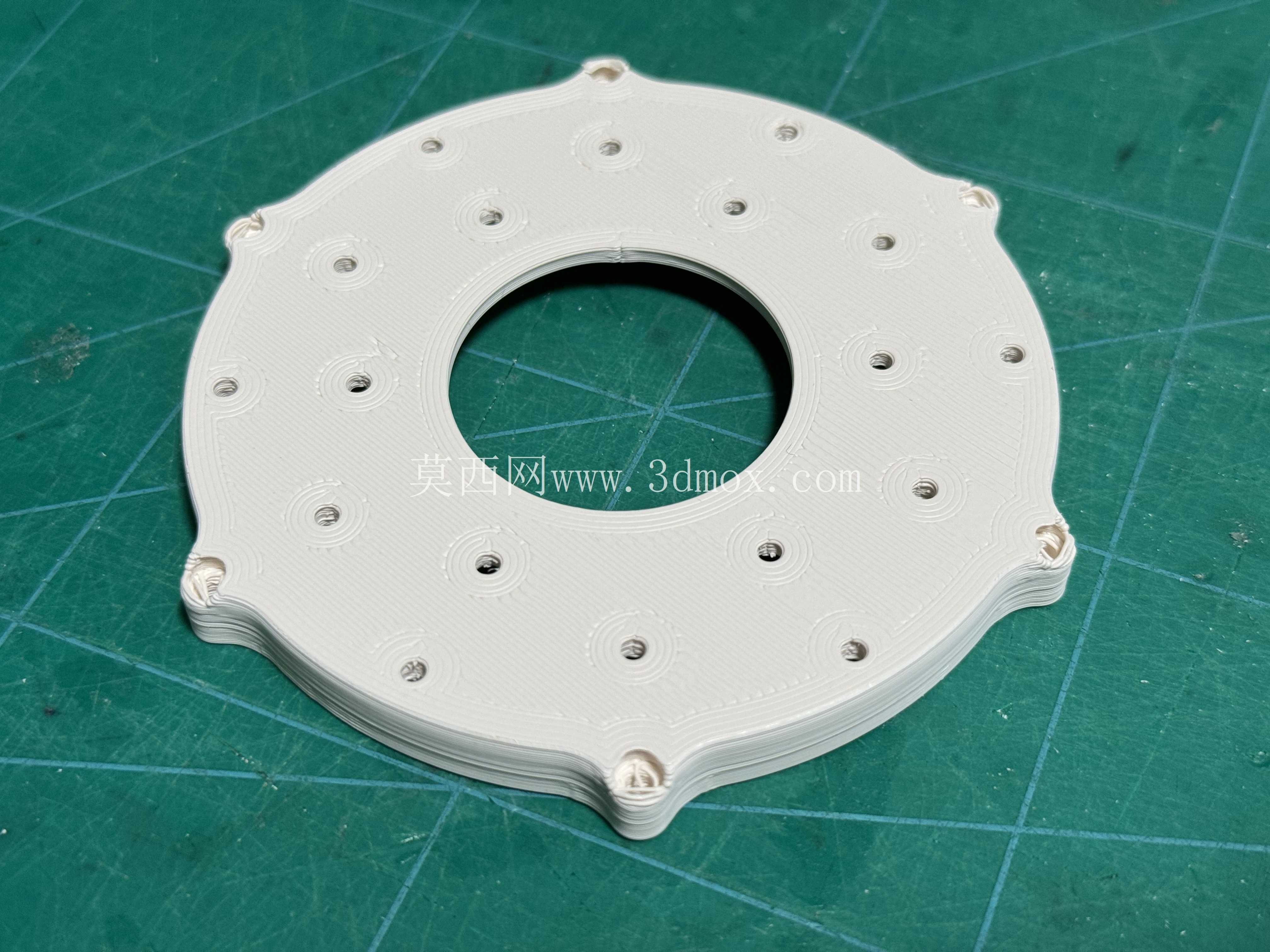













完整的 Ramp;D 文档位于本项目附件的 PDF 文件中。这款机器人是一款紧凑型高扭矩四足机器人,采用定制的执行器,包括 9.8:1 的 3D 打印行星齿轮箱、60 毫米无刷电机和集成式磁编码器。每个执行器都是一个刚性模块,具有可控的公差、稳定的轴承支撑以及简洁的电机引线、编码器接线和热敏电阻走线路径,使得关节易于维护和监控。每条腿由两个 16 厘米长的连杆组成,通过皮带驱动的膝关节连接,使电机质量靠近底盘,确保平稳的扭矩传输。肩关节结合了大型径向轴承和三滚轮侧向加载系统,以保证负载下的稳定运行。连杆、轴承和滑轮的几何形状经过精心设计,兼顾了刚性、低摩擦和精确可重复的运动。底盘采用铝型材,并配有 ASA/rPLA 接口板,用于固定执行器,同时方便接线和维护。一个带有两个 30 毫米内部风扇的印刷外壳为 ODrive 控制器和电力电子元件提供有序的散热,集成的线缆通道使布线整洁且无干扰。在电气方面,该机器人通过六个 ODrive 控制器驱动十二个电机,这些控制器由 Teensy 4.1 协调,Arduino Mega 则负责管理热敏电阻输入和无线电控制数据。双电池系统由……组成。
一个6S牵引电池组和一个2S逻辑电池组为分阶段供电的电源板供电,该电源板具有浪涌保护和机械预充电钥匙,该钥匙同时也是紧急停止按钮。EMI屏蔽的编码器接线、MT30电机连接器和在线保护点确保了运行过程中的稳定性。总而言之,最终的机器人是一款刚性强、可靠性高、性能优异的四足机器人,专为精确的运动控制和未来的实验开发而设计。
------分隔线----------------------------
- 上一篇:移动机器人 - E4
- 下一篇:ESP32 C6 Wroom 1

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Other