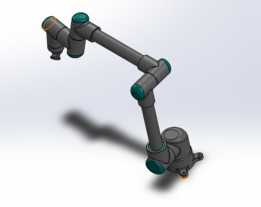
机械臂
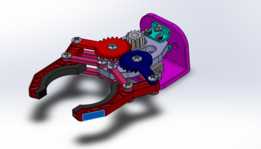
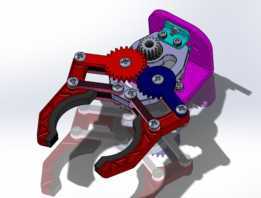
机器人夹爪是一种末端执行器,设计用于在自动化或机器人系统中抓取、保持和操作物体。它相当于机器人的“手”,将机械或电信号转换为精确的运动和抓取力。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

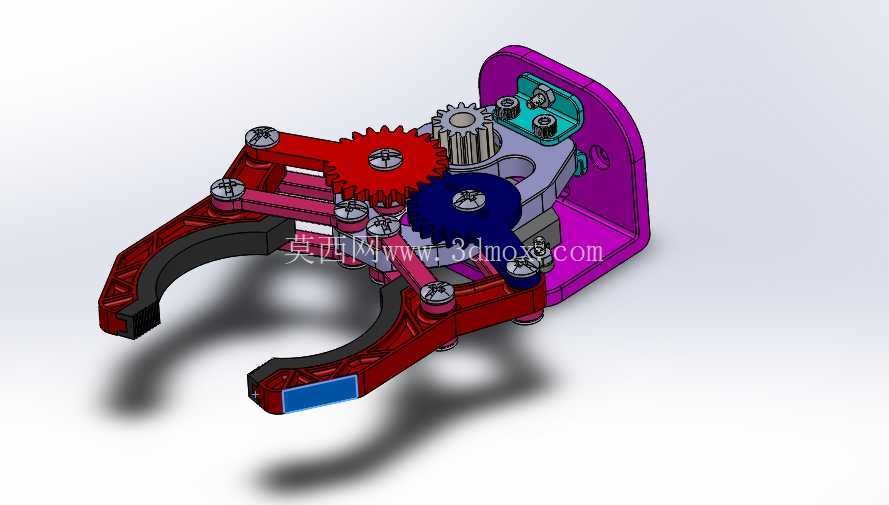
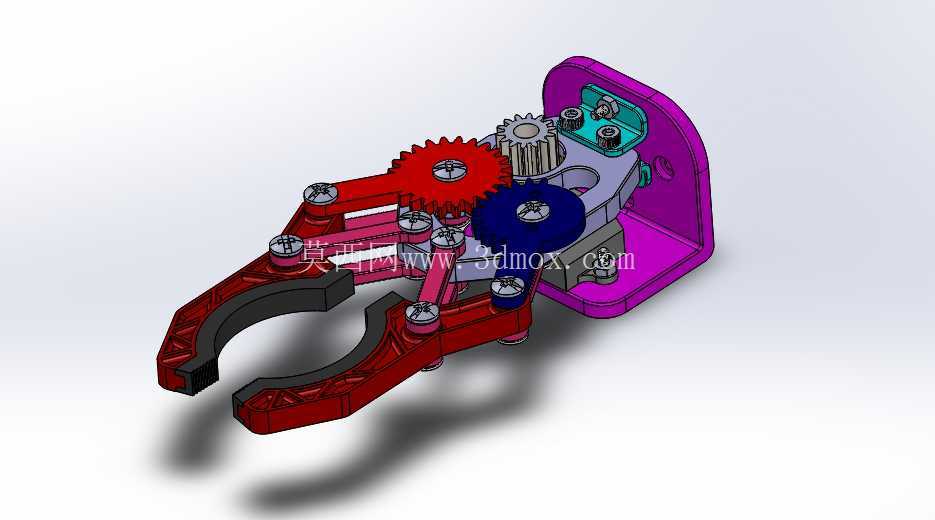
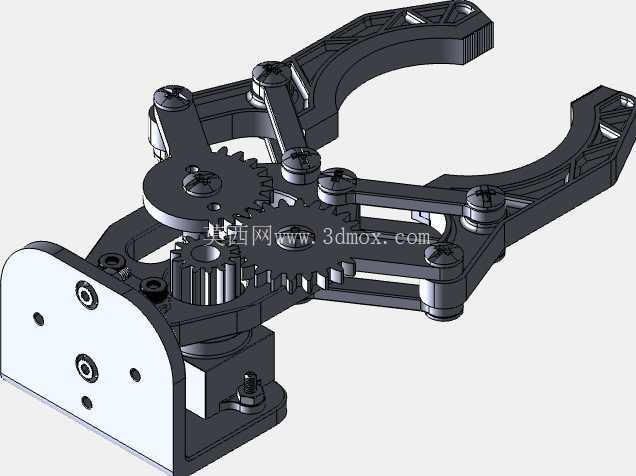
机器人夹爪是一种末端执行器,设计用于在自动化或机器人系统中抓取、保持和操作物体。它相当于机器人的“手”,将机械或电信号转换为精确的运动和抓取力。