

5自由度机器人夹爪
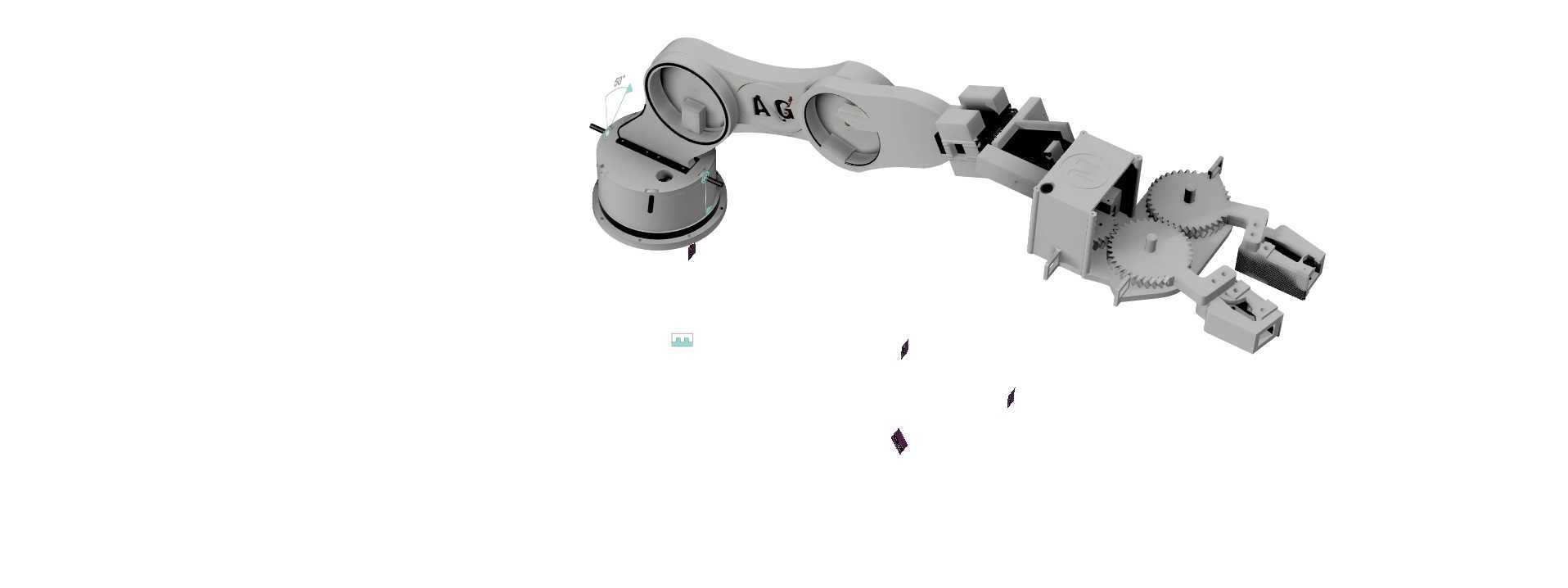







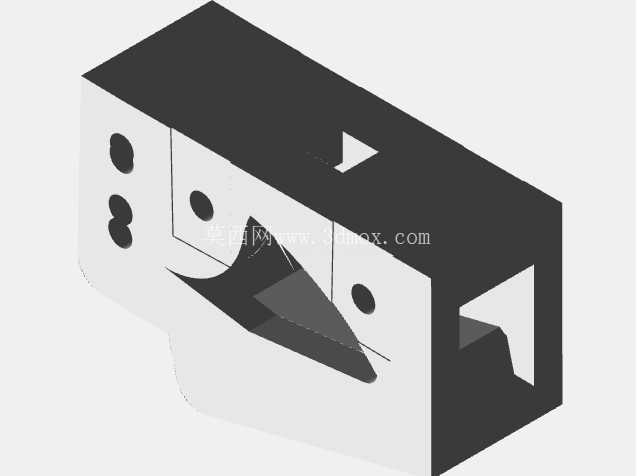


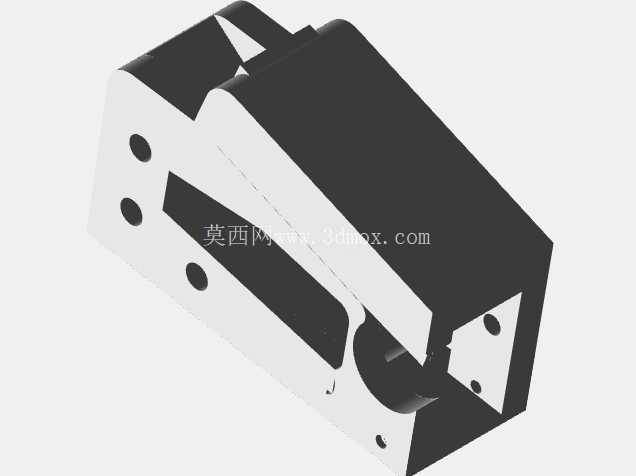
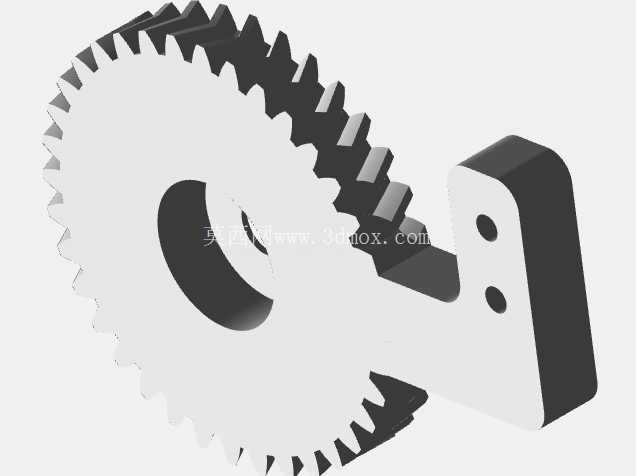
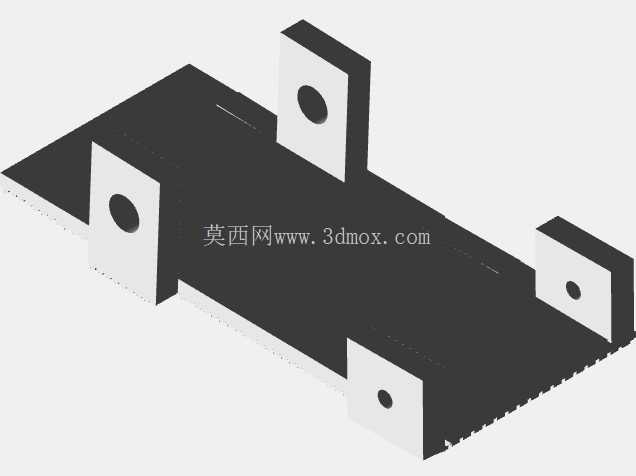

这是我准备进行3D打印的机器人抓手的最终设计图。它包含/你需要准备的材料:-人字齿轮。-5个MG996R舵机。-用于舵机臂的M1.5螺丝。-用于舵机安装中心孔的M3螺丝(比原装螺丝更长)。-用于爪子和底座的M4螺丝。-将通过操纵杆控制,我会更新相关细节。-1个6x6按钮,爪子接触时按下。-左爪上的红外传感器。-2个LED灯,用于显示不同的运动状态。-2个8mm和1个6mm内径的滚珠轴承,用夹具压入齿轮中。-2个8mm内径的轴环。我用 Fusion 360 和 Inventor 仿真软件测试了爪基座(齿轮支撑处)的弯曲情况以及可能的变形情况。我用 PETG 材料打印了模型,现在将开始编程。如有任何疑问,请随时联系我!


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,Rendering

























