
机械臂
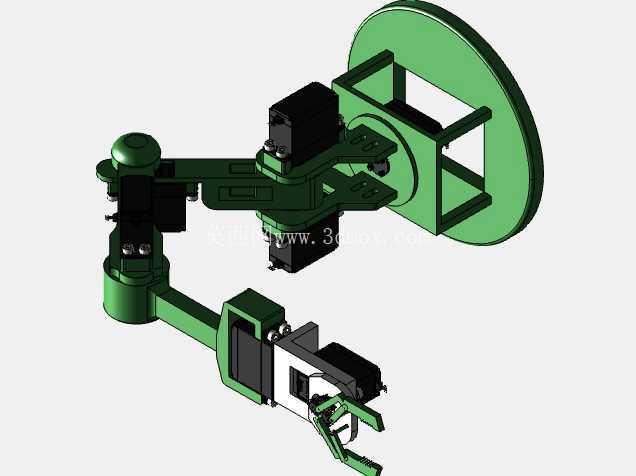
1.“一款专为拾取和放置操作设计的六自由度机械臂,采用SolidWorks建模,配备伺服电机关节,可实现平滑的运动。”2.“一款适用于教育和轻工业用途的紧凑型机械臂原型,采用模块化关节设计,部件易于3D打印。”
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering


1.“一款专为拾取和放置操作设计的六自由度机械臂,采用SolidWorks建模,配备伺服电机关节,可实现平滑的运动。”2.“一款适用于教育和轻工业用途的紧凑型机械臂原型,采用模块化关节设计,部件易于3D打印。”

















