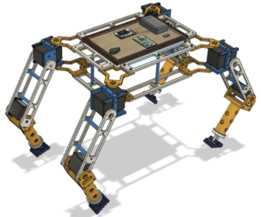
四足机器人
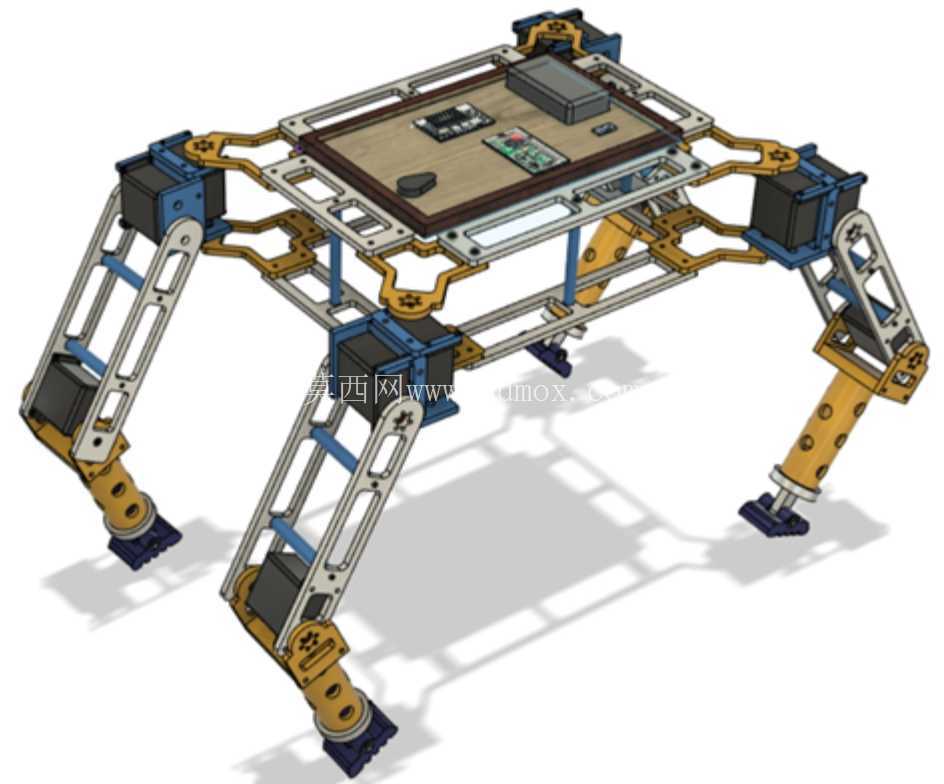
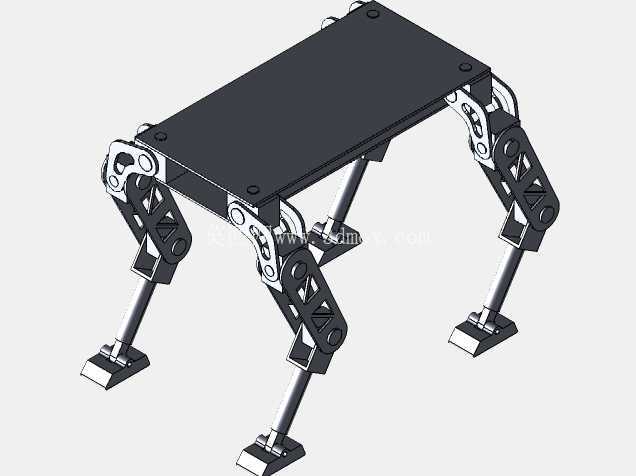
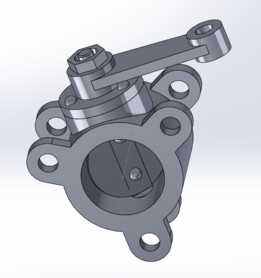
本项目是机器人领域的一项开创性尝试。该设计采用 Creo Parametric 软件实现。这款先进的机器人充分利用了物联网 (IoT) 的强大功能,专为矿区和外太空等复杂地形而设计。机器人使用激光雷达 (LIDAR) 和超声波传感器采集地理数据,并采用 NVIDIA Jetson Nano 开发板进行强大的数据处理。腿部垫片采用 3D 打印技术制造,并集成伺服电机以实现运动。这些先进技术的结合使机器人能够在复杂环境中高效运行,代表了机器人领域的一次重大飞跃。注:由于保密原因,我仅上传了初始模型文件。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering