爬楼梯机器人




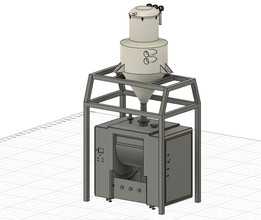
基于Fusion 360设计的爬楼梯清洁机器人是一款先进的机器人解决方案,旨在确保高效清洁不同楼层,包括楼梯。这款机器人拥有坚固的底盘,配备专业的爬升机构和集成式清洁组件,使其成为住宅和商业环境的理想之选。主要特点:坚固的底盘:机器人的底座框架采用高强度材料设计,确保运行过程中的耐用性和稳定性。爬升机构:机器人采用履带式或轮式爬升系统,使其能够高效地在楼梯上行走和清洁。履带或轮子采用高抓地力设计,防止打滑。清洁组件:机器人配备强劲的吸尘电机、旋转刷和拖布,提供全面的清洁服务。吸尘电机负责收集灰尘和碎屑,而刷子和拖布则确保彻底清洁表面。传感器和导航:集成的超声波和红外传感器可检测障碍物,并引导机器人平稳地穿梭于不同楼层。这些传感器还能防止机器人从楼梯上摔下来。控制系统:机器人由一套精密的微控制器系统控制,该系统管理攀爬机构、清洁组件和传感器。该系统确保同步运行和最佳性能。电池和电源
管理:该机器人采用高容量可充电电池供电,确保更长的运行时间。高效的电源管理系统可优化电池使用。设计流程:草图绘制与拉伸:设计首先创建底座框架和组件的二维草图,然后将其拉伸形成三维模型。组件集成:将电机、齿轮、传感器和清洁组件添加到底盘上,确保正确的对齐和功能。仿真与测试:该设计经过严格的仿真测试,以检验结构完整性、爬升能力和清洁效率。根据仿真结果进行调整。最终组装:测试成功后,对机器人进行虚拟组装,确保所有组件完美契合并协同工作。这款在 Fusion 360 上精心设计的爬楼梯清洁机器人,结合了创新工程和先进技术,可在平面和楼梯上提供卓越的清洁性能。
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering