Dual Cam Shuffler for The Wall pt 2
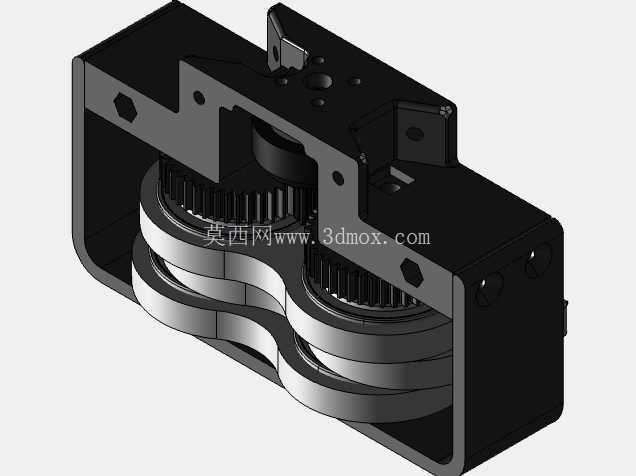
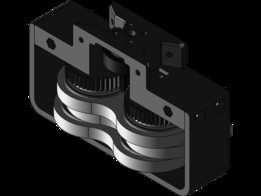
这是我为我的4.5磅重甲虫机器人“墙”第二部分设计的快速双凸轮换向机构。它使用Just Cuz 1000kv 2306.5无刷电机和Just Cuz 11齿模数0.8齿轮。齿轮和框架采用910尼龙合金,凸轮和支腿采用TPU材质。支腿周围的护罩采用PLA Pro材质。夹板原本是弹簧钢材质,但我打算尝试钛合金。凸轮每侧使用六个内径25mm、外径37mm、孔径7mm的滚珠轴承,45齿齿轮内部使用四个内径5mm、外径10mm、孔径4mm的滚珠轴承。六角形开口可容纳30mm M4母对母螺柱。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES