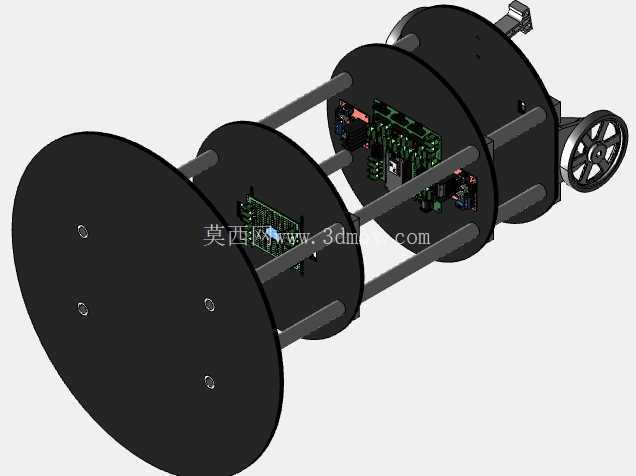
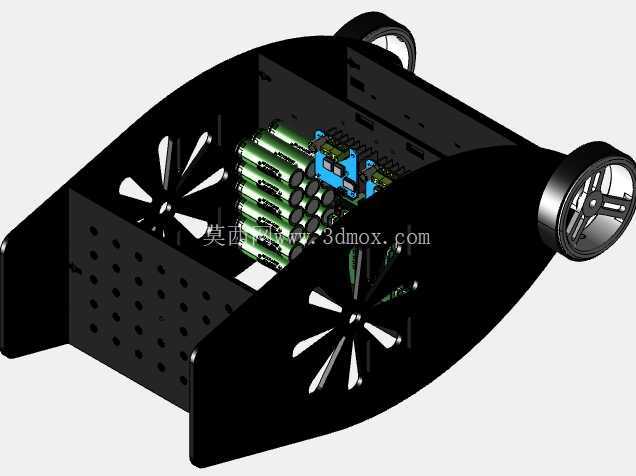
平衡机器人(测试版)
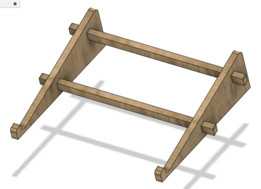
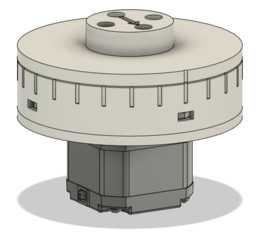
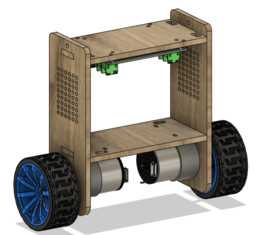
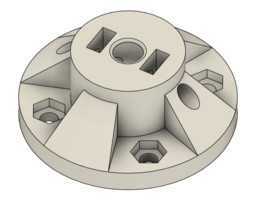
这些是我为了测试各种电机控制算法而制作的自平衡机器人的不同版本。每个版本都使用了不同类型的电机,并且尺寸设计也各不相同。它们主要采用5毫米厚的木材激光切割工艺制造(因为激光切割是一种快速的零件生产方式)。此外,部分零件也使用了3D打印技术。感谢您的关注。请点赞并关注,以便及时了解未来的项目进展。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES

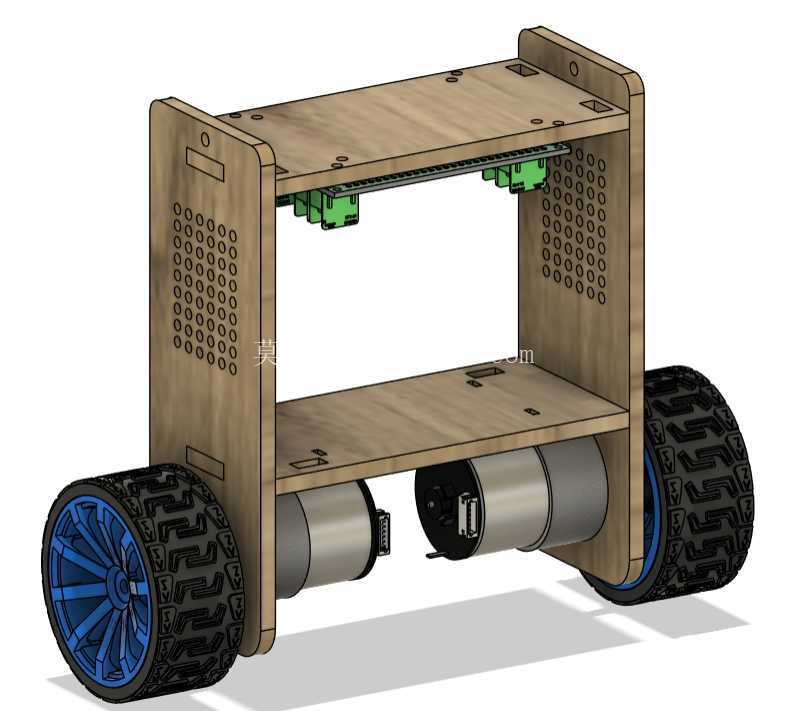


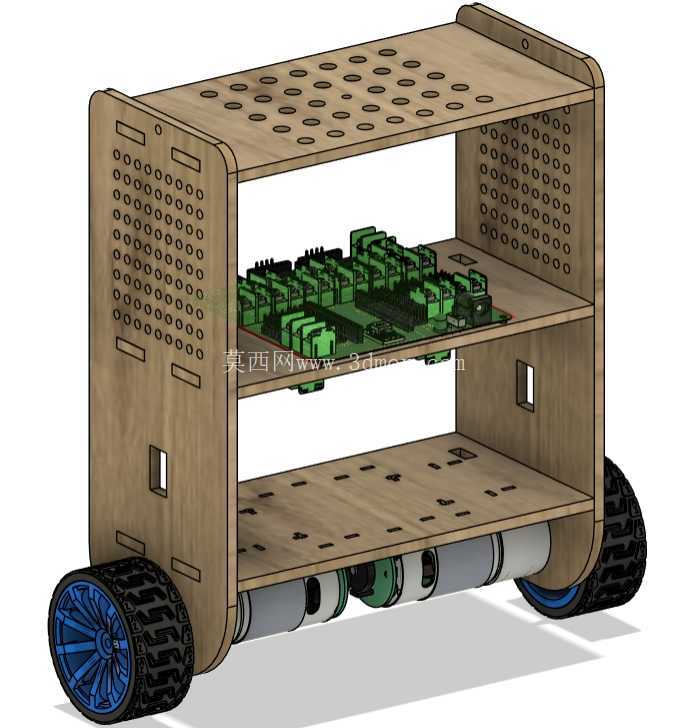


这些是我为了测试各种电机控制算法而制作的自平衡机器人的不同版本。每个版本都使用了不同类型的电机,并且尺寸设计也各不相同。它们主要采用5毫米厚的木材激光切割工艺制造(因为激光切割是一种快速的零件生产方式)。此外,部分零件也使用了3D打印技术。感谢您的关注。请点赞并关注,以便及时了解未来的项目进展。