四足机器人
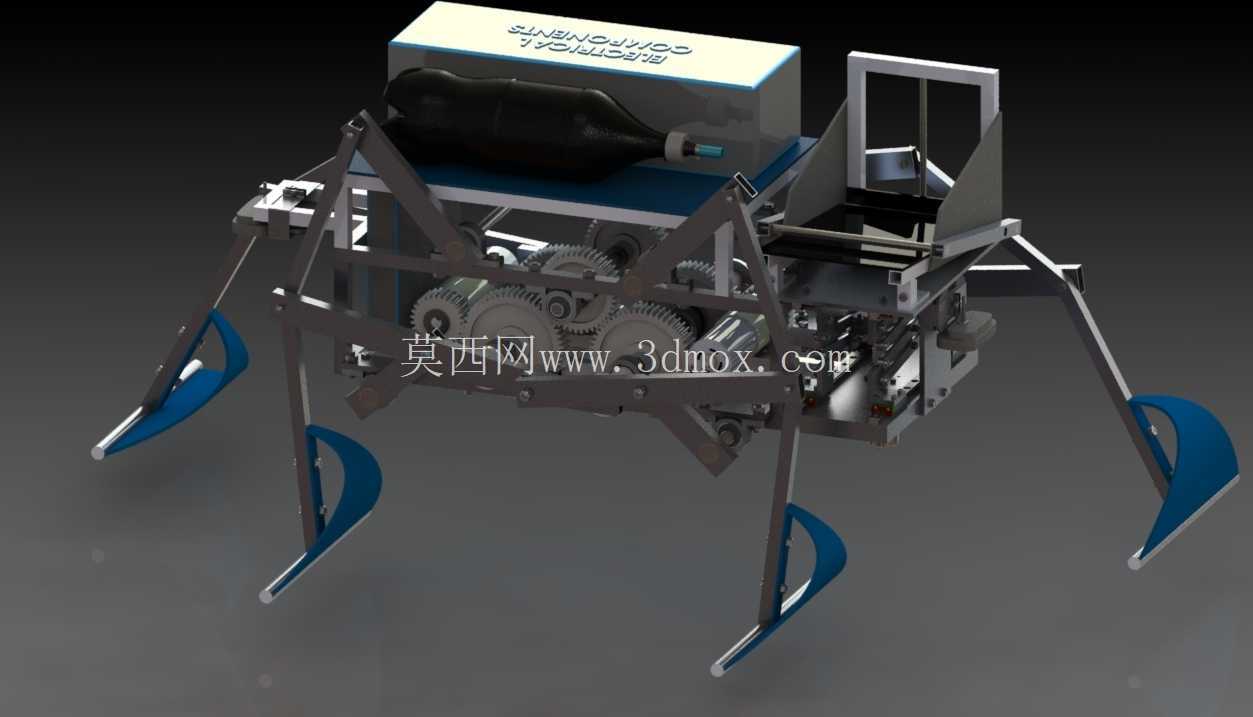
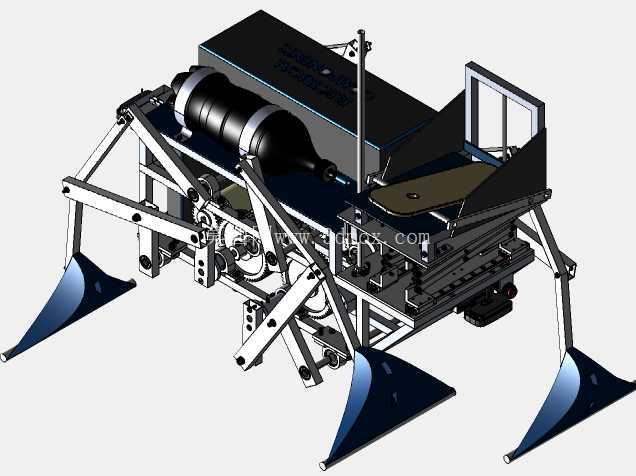
这是一款自主四足机器人,采用定制齿轮传动装置,利用克朗机构实现腿部机械化,从而模仿动物的行走模式。该机器人配备板载树莓派和摄像头,用于检测物体和自主导航。
标签:
------分隔线----------------------------
- 上一篇:PBD-34 (DS1023-2X17)
- 下一篇:8mm轴联器

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering