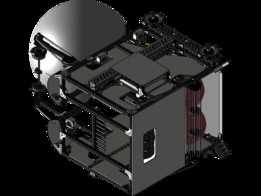
Mark 3
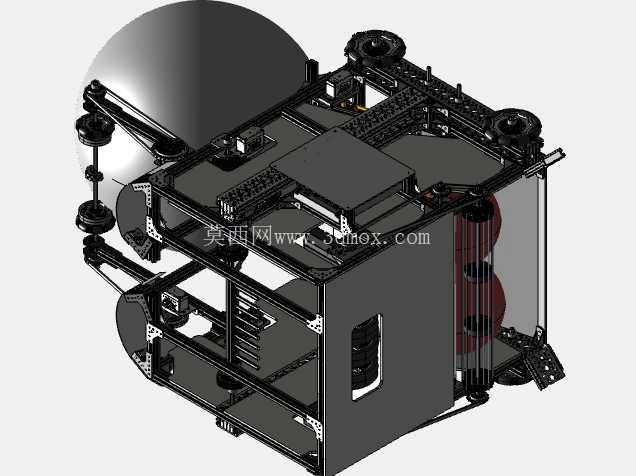

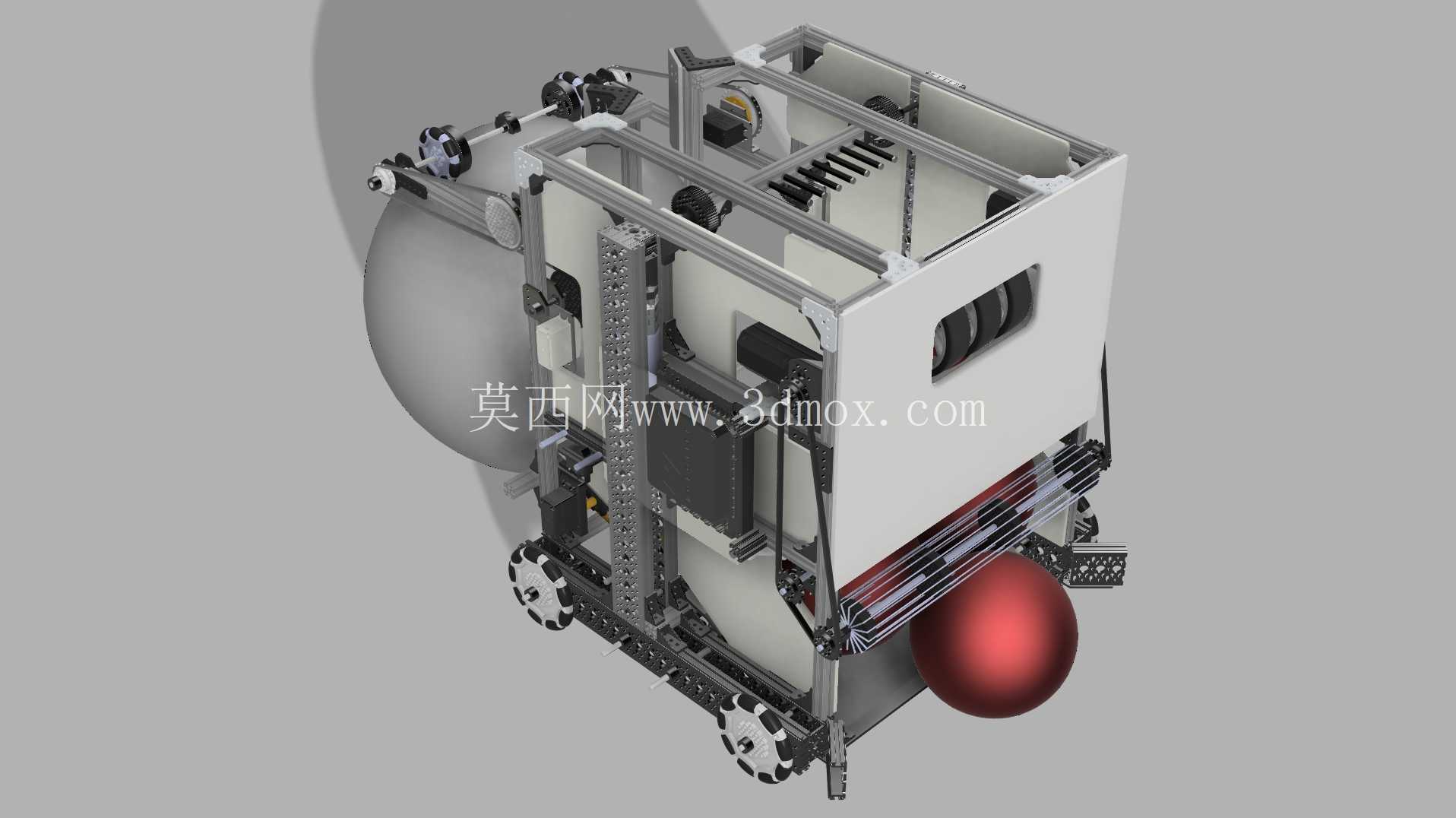

ҙЛCADДЈРНХ№КҫБЛОЪЧИұрҝЛЛ№М№НЕ¶УОӘІОјУ2025ДкFIRSTИ«ЗтМфХҪИь¶шЙијЖөДіхКј»ъЖчИЛФӯРНЎЈёГ»ъЖчИЛТФР§ВКәН№ҰДЬРФОӘЙијЖәЛРДЈ¬ҝЙН¬Кұҙжҙў¶аҙп15ёцЗтЈЁЙъОп¶аСщРФөҘФӘЈ©ІўФЛКдТ»ёцХП°ӯОпЎЈЖдЗэ¶ҜөЧЕМУЙЛДёцёЯРФДЬөз»ъЗэ¶ҜЈ¬ІўІЙУГ4:3јхЛЩіЭВЦЈ¬ФЪіЎөШЦРМṩЧҝФҪөДЗЈТэБҰЎўБй»оРФәНҝШЦЖБҰЎЈЕКЕА»ъ№№УЙБҪёцёЯЕӨҫШөз»ъЗэ¶ҜЈ¬ІЙУГ5:4:3јхЛЩПөНіЈ¬К№»ъЖчИЛДЬ№»ФЪ¶М¶М8ГлДЪРь№ТІўЕКЕАЙюЛчЎЈҙУёЕДоҝӘ·ўөҪЧоЦХCADКөПЦЈ¬ХыёцЙијЖ№эіМФЪТ»ёцФВДЪНкіЙЎЈ
------·ЦёфПЯ----------------------------
- ЙПТ»ЖӘЈәЛ®БҰНЖҪшЖч
- ПВТ»ЖӘЈәҝЁ¶ЎіөЙІіөұГ

ЛөөгКІГҙ°Й
- И«ІҝЖАВЫЈЁ0Ј©

»№Г»УРЖАВЫЈ¬ҝмАҙЗАЙі·ў°ЙЈЎ
- ДЈРНҙуРЎ ЈәОҙЦӘ
- Пы әД Јә5ДӘОчөг
- ПВФШҙОКэ Јә
- °ьә¬ОДјю ЈәSTEP / IGES,Rendering