

3 指 8 自由度夹钳
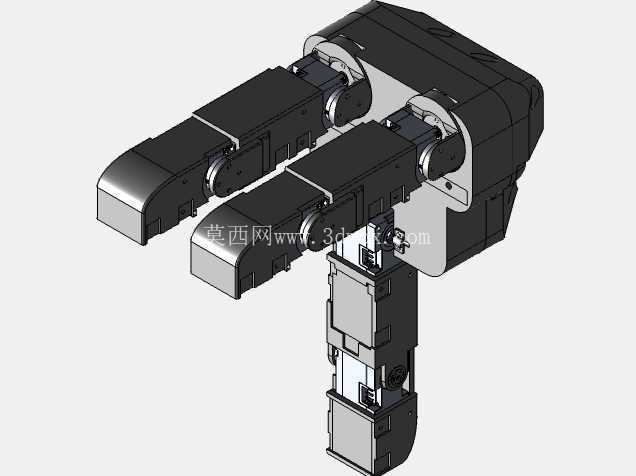
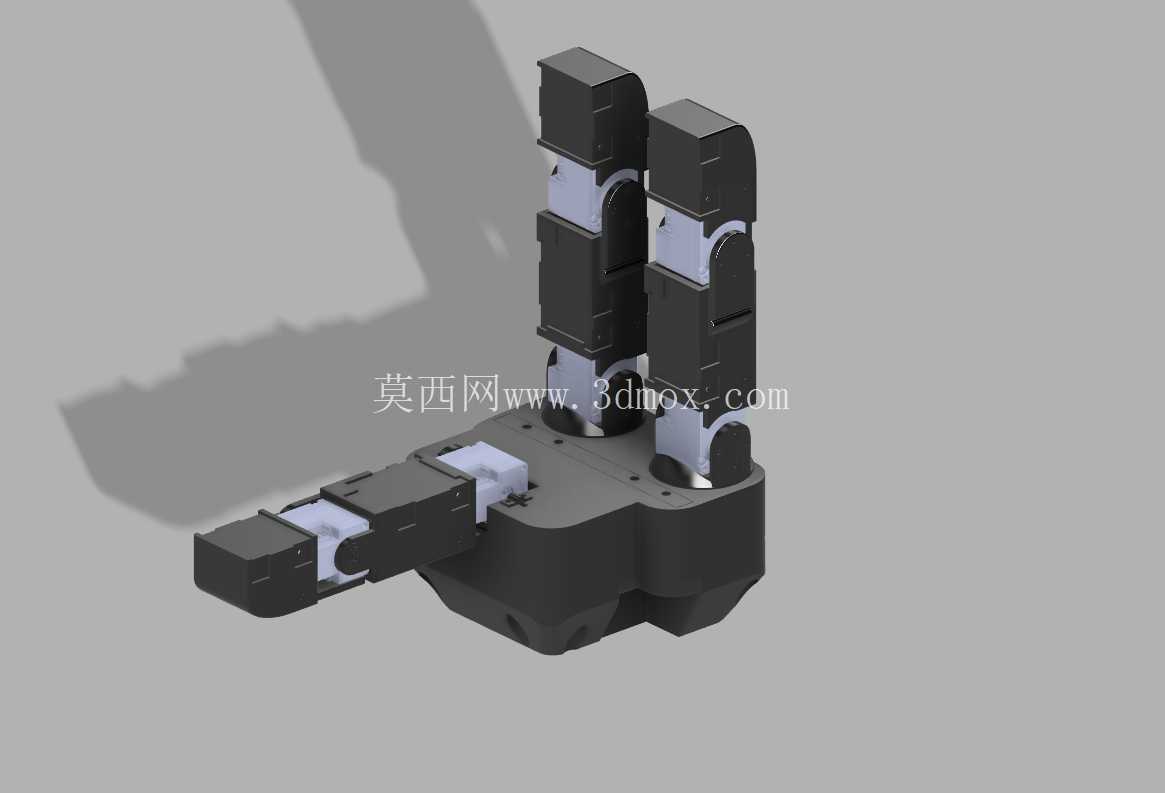
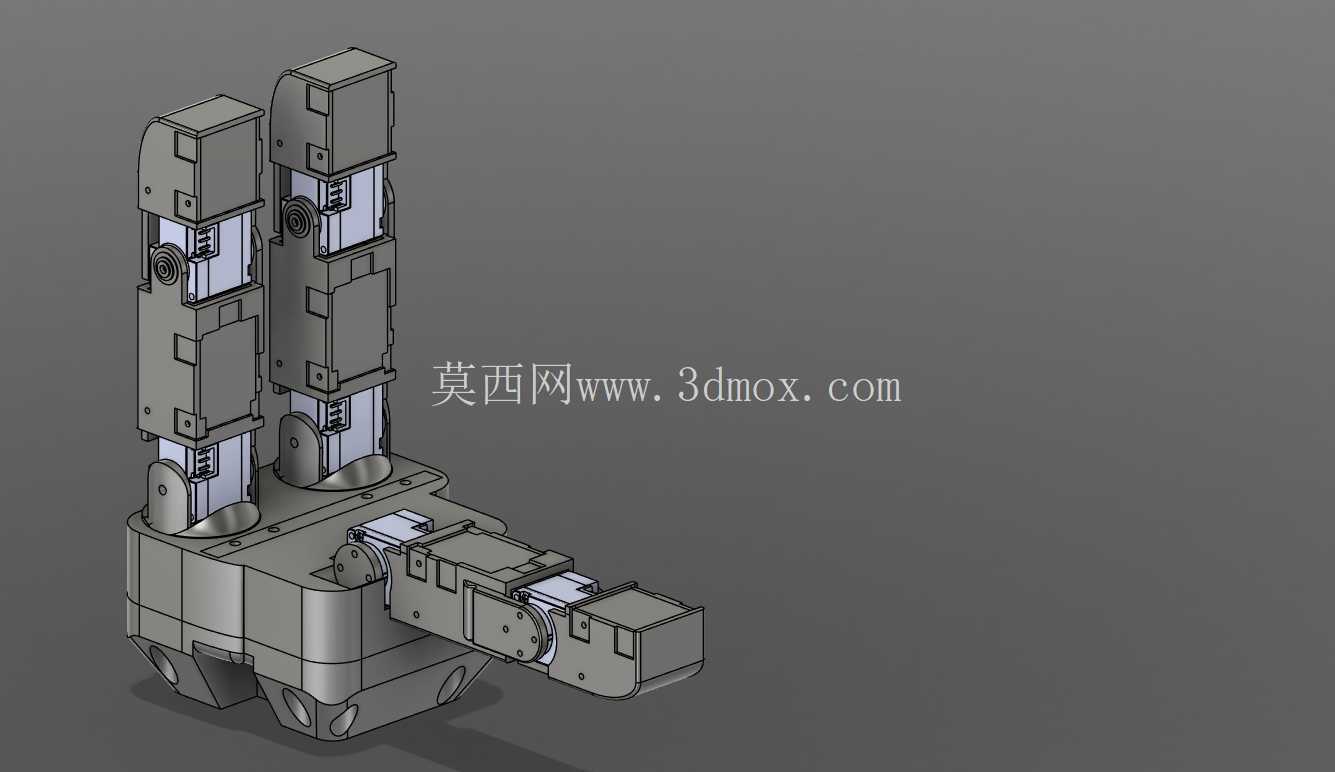
用于 Dynamixel XL330 的参数化 3 指、8 自由度机器人抓手这是一款采用 Dynamixel XL330 M288-T 电机设计的 3 指机器人抓手,以便您可以将其适应您自己的项目。项目状态:尚未进行物理测试 - 这是原型/实验设计。要求:8 个 Dynamixel XL330 M288-T 电机M2 螺钉 (小、中、长),几个 M4 螺丝Dynamixel 通信适配器(U2D2 或兼容)您首选的控制板(Arduino、Raspberry Pi 或任何兼容板)电源:推荐最大 12V DC 包含文件:.f3d .step注释:尺寸和主要功能可以使用 Fusion 360 中的用户参数进行调整。包含的 Dynamixel 模型仅供参考,不用于商业用途。欢迎反馈和改进。作者:Lorah
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Fusion 360,STEP / IGES,Rendering

















