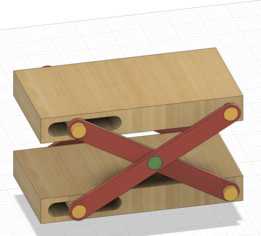
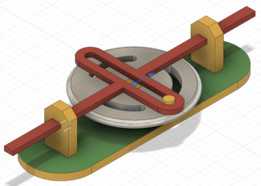
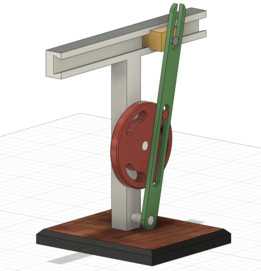
剪式举升机构
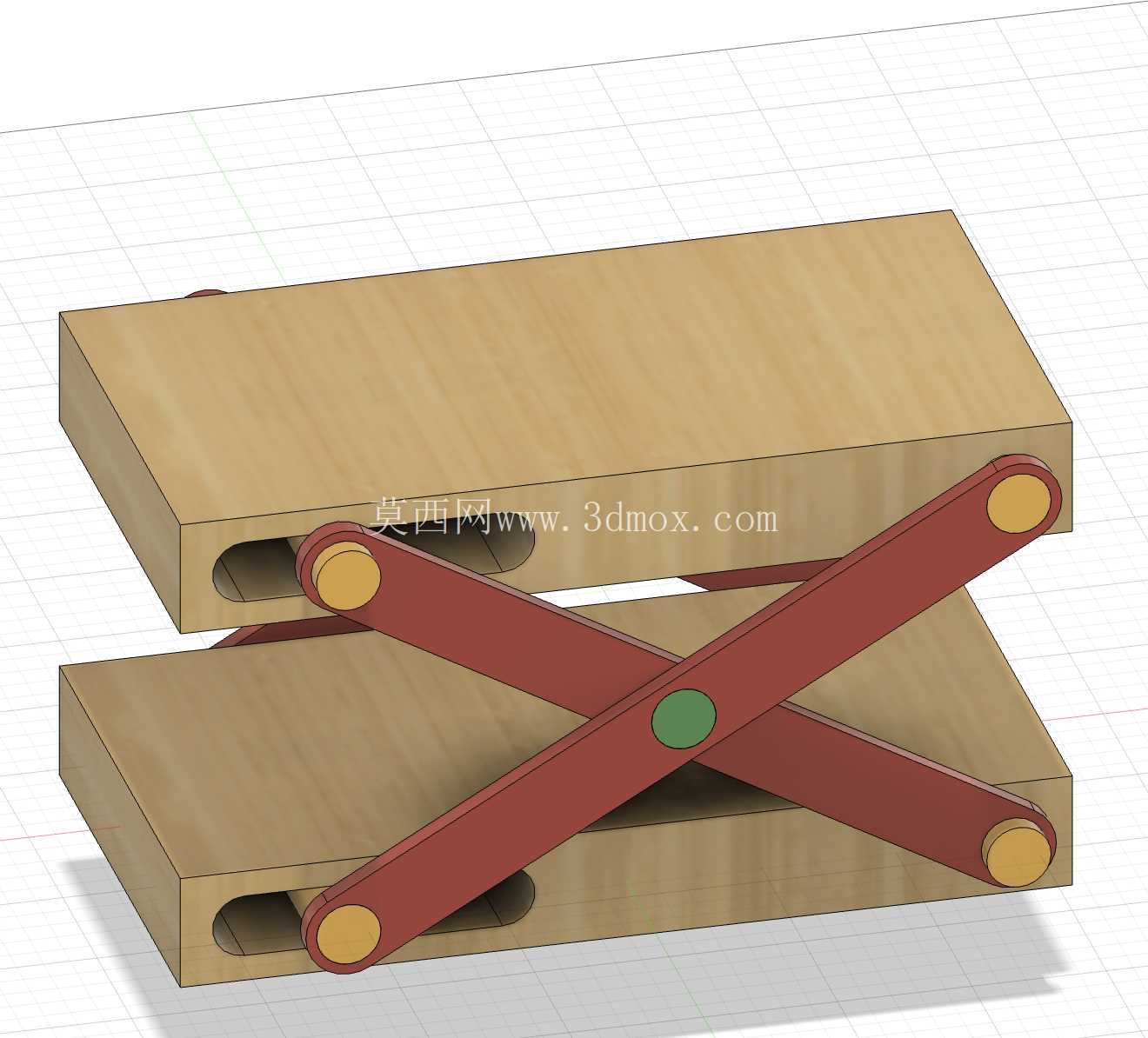
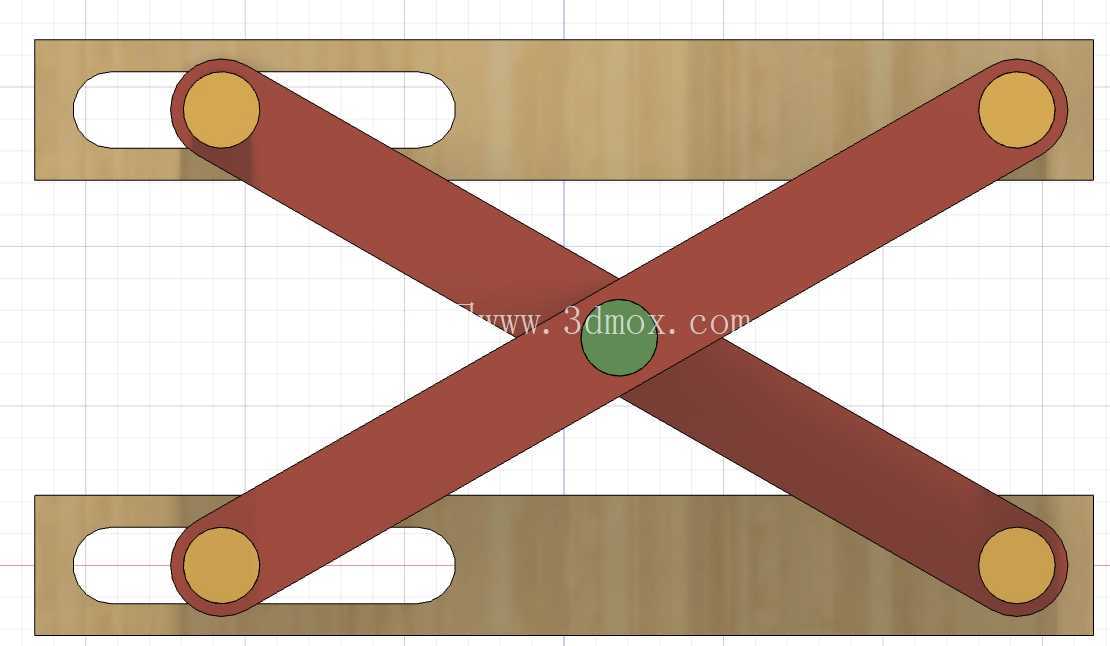

该模型代表剪式举升机构,旨在演示通过连接臂系统进行受控垂直运动。 The assembly converts input motion into smooth linear elevation, reflecting the working principle commonly used in lifting platforms and material handling systems.The design incorporates crossed linkages connected through pivot joints, ensuring synchronized motion and structural stability during elevation. Slotted guides are integrated to allow controlled movement and alignment of components, enhancing the overall functionality of the system.Special attention has been given to joint placement, motion constraints, and structural layout, making the model suitable for understanding kinematics, mechanism design, and real-world lifting applications.1. 用于垂直运动转换的高效剪刀连杆2。 用于引导运动的集成槽机构3。 稳定且对称的负载处理结构4。 Suitable for educational, mechanical, and design reference purposesThis project highlights the practical application of mechanical linkage systems combined with precise CAD modeling to represent a functional and scalable lifting mechanism.


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Fusion 360,Rendering