Omni-Wrist III,内部联动,版本。 05
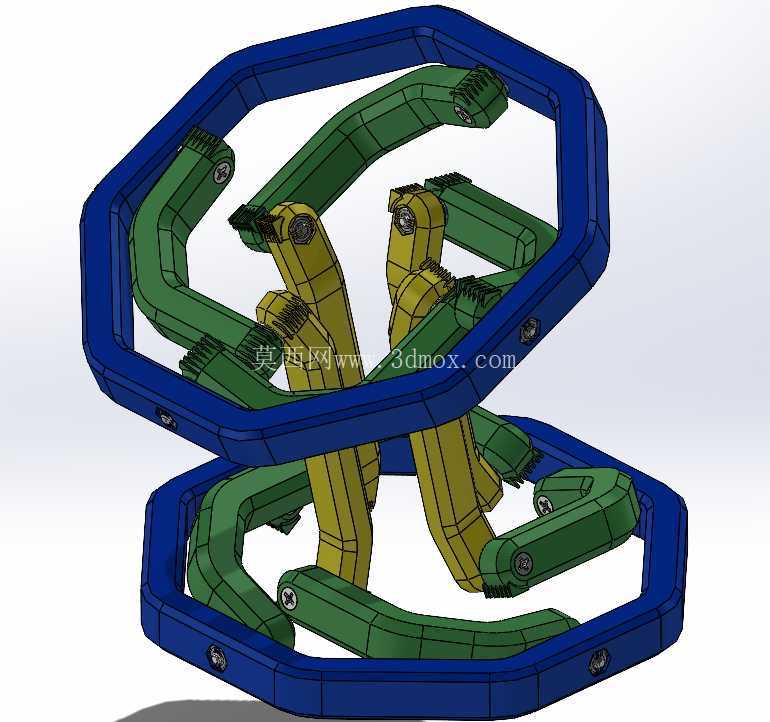

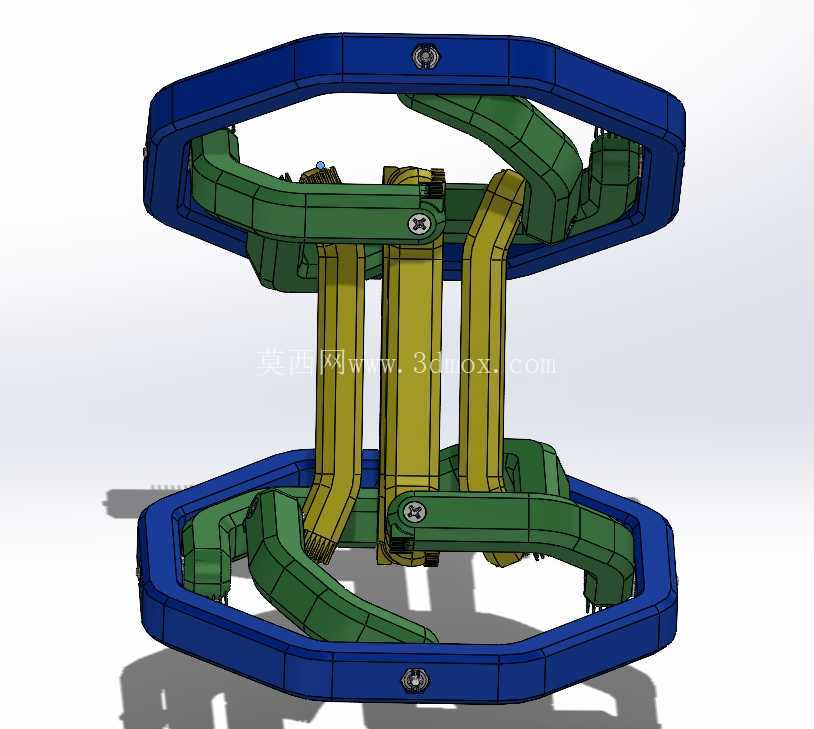
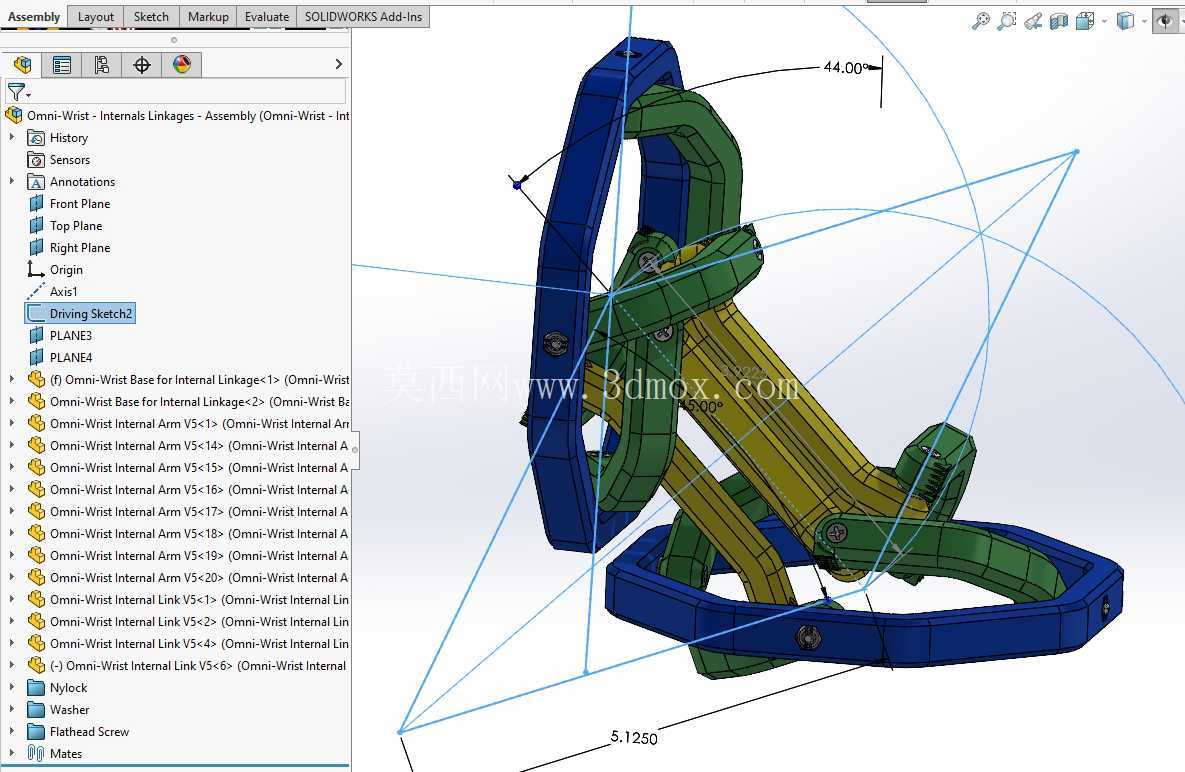
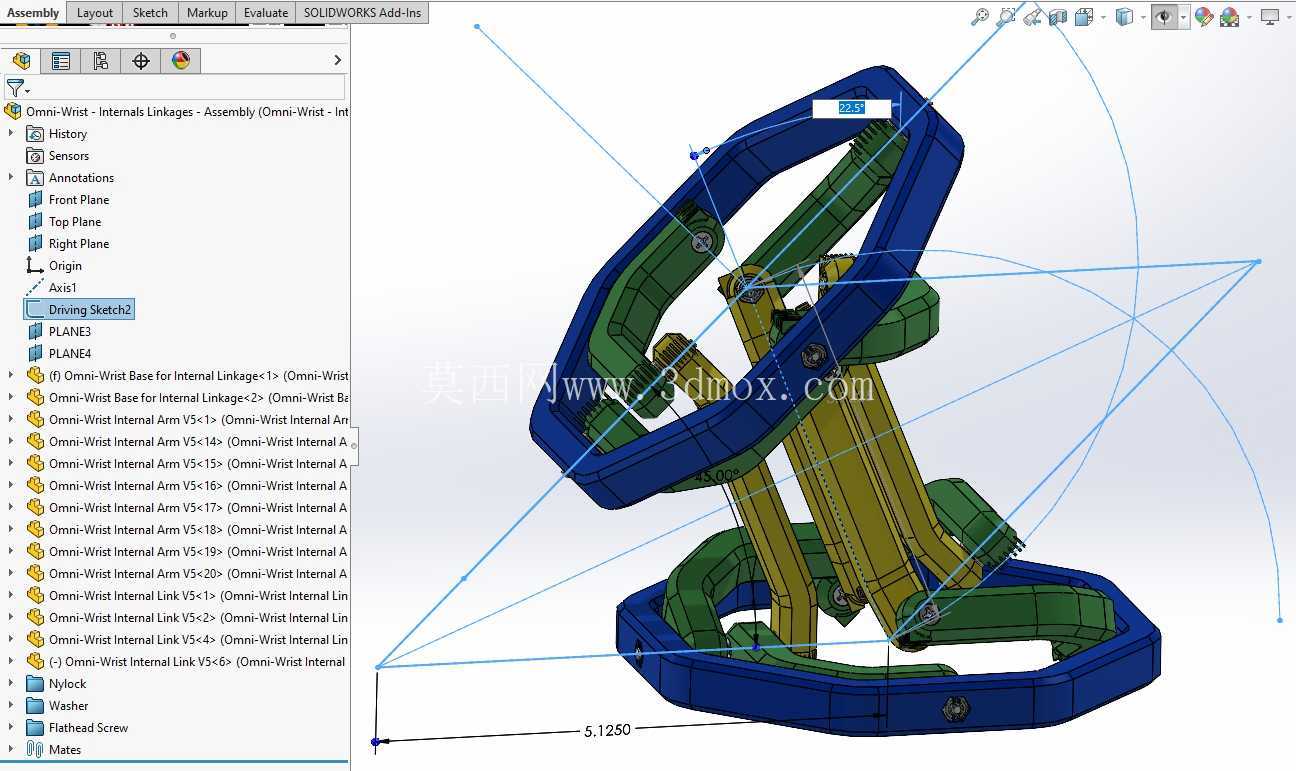
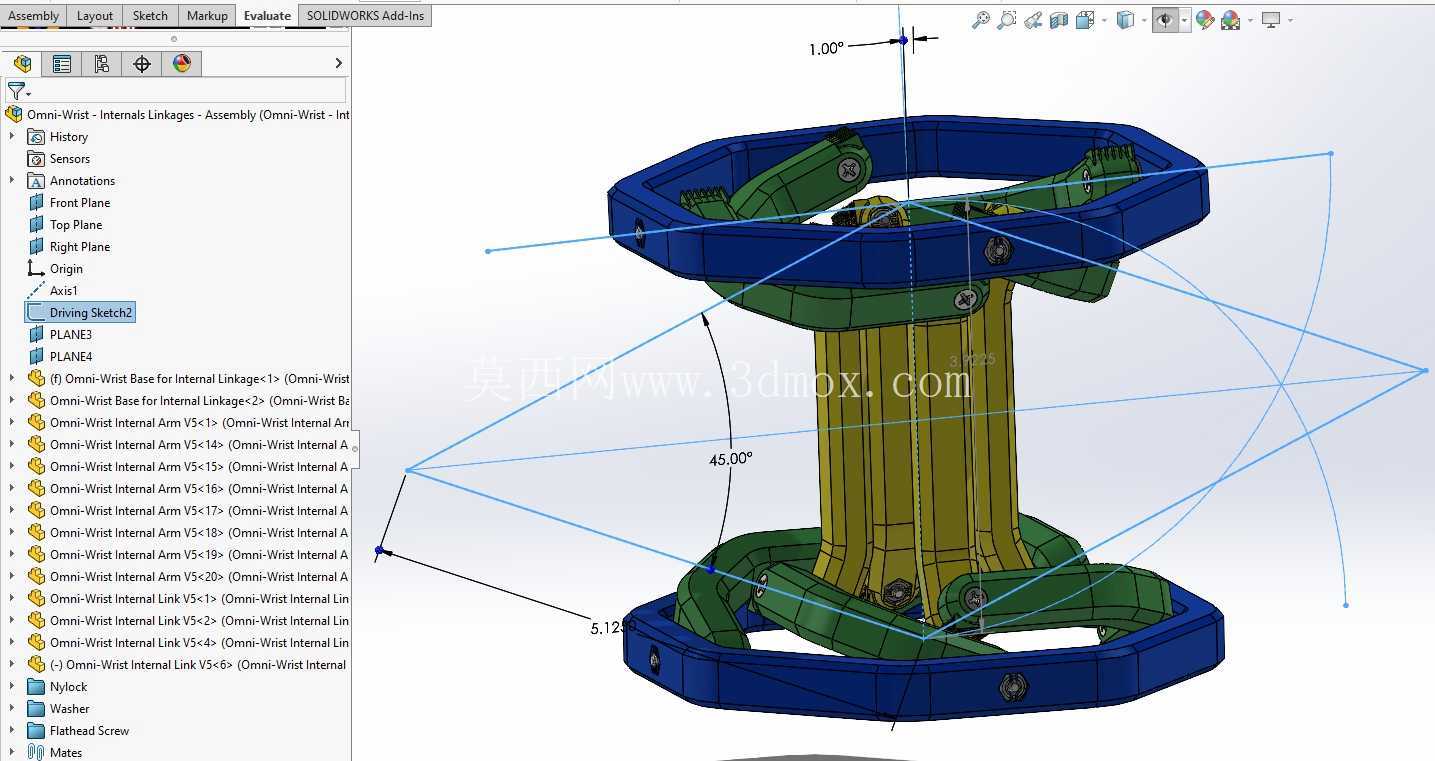



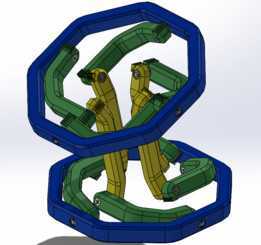
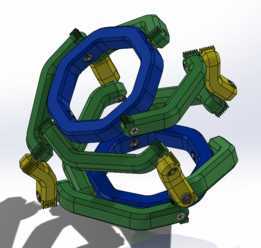
无奇点的全半球范围机器人操纵器,如 Omni-Wrist III,其设计目的是在操作时不会失去控制或陷入“奇点”状态,允许在所有方向上进行完整运动(偏航/俯仰)。您可以用 2 个执行器覆盖整个半球。这是我一直梦想在 2000 年左右在《机器设计杂志》上看到的设计。我相信这种内部连杆设计是它的第一个 善良..希望看到年轻和年长的学生在此基础上制作项目。享受


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,SOLIDWORKS,Rendering