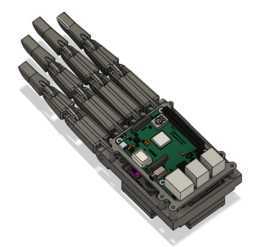
仿生机械手 v1.0


这是一个伺服驱动的手,由 Raspberry Pi 和 4 个 MG996R 伺服系统控制。 一根松紧带从指关节底部绑到指甲上,一根绳子缠绕在手指下方,绑在伺服器上,将手指向下拉。 这是许多未来版本的 1.0 版本。 未来版本的目标是重现人手及其所有自由度的运动。
------分隔线----------------------------
- 上一篇:管壳式低温换热器(ICT)
- 下一篇:Rook 3D打印机300mm

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering