带移动底座的机械臂(Robotic Explorer)
这是专为探索和物料搬运而设计的全地形移动机器人的 3D 模型。 该组件具有坚固的四轮驱动 (4WD) 底盘和多轴机械臂,带有用于执行精密任务的专用夹具。 该手臂有 5 个自由度,并且该组件具有深胎面轮胎,可在粗糙的表面上行驶


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering


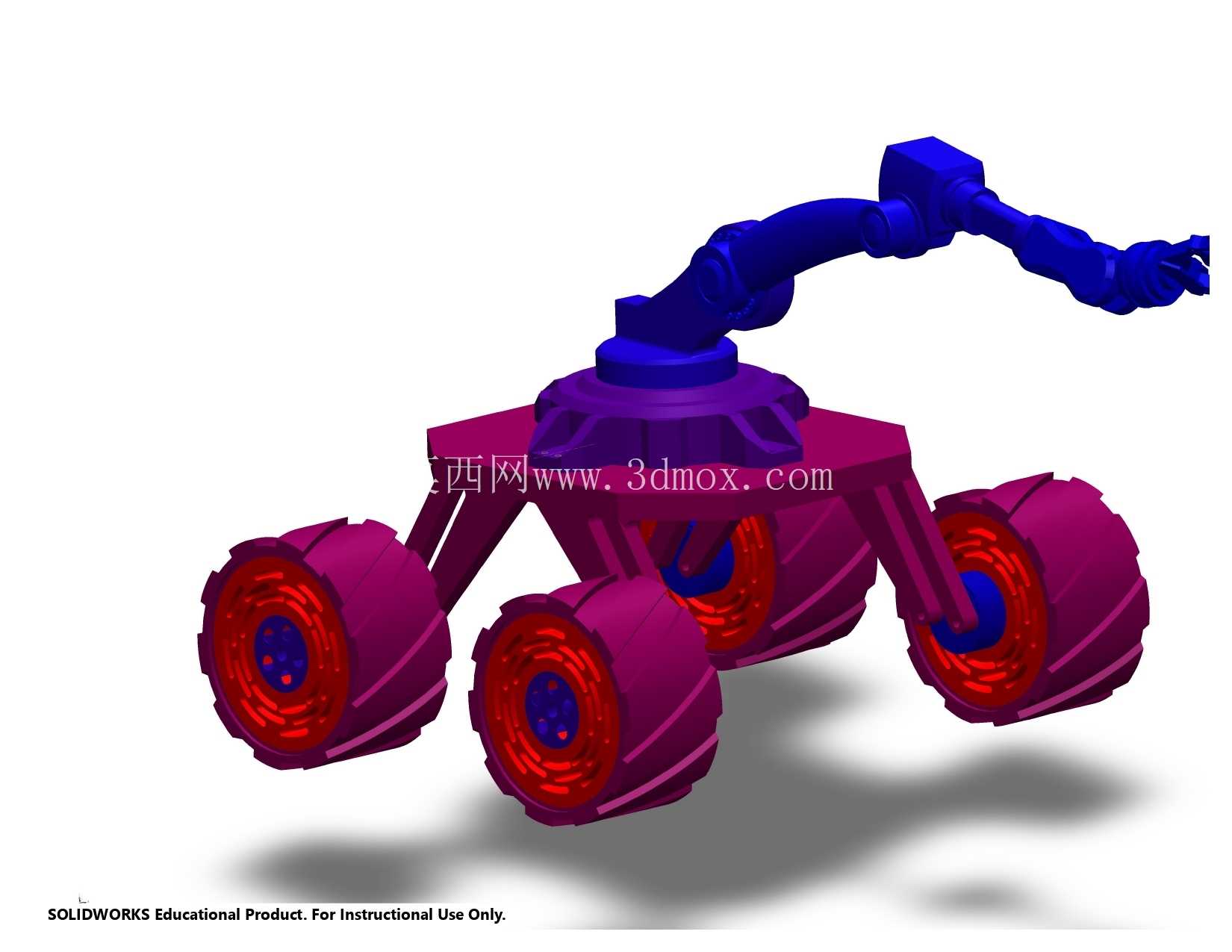









这是专为探索和物料搬运而设计的全地形移动机器人的 3D 模型。 该组件具有坚固的四轮驱动 (4WD) 底盘和多轴机械臂,带有用于执行精密任务的专用夹具。 该手臂有 5 个自由度,并且该组件具有深胎面轮胎,可在粗糙的表面上行驶