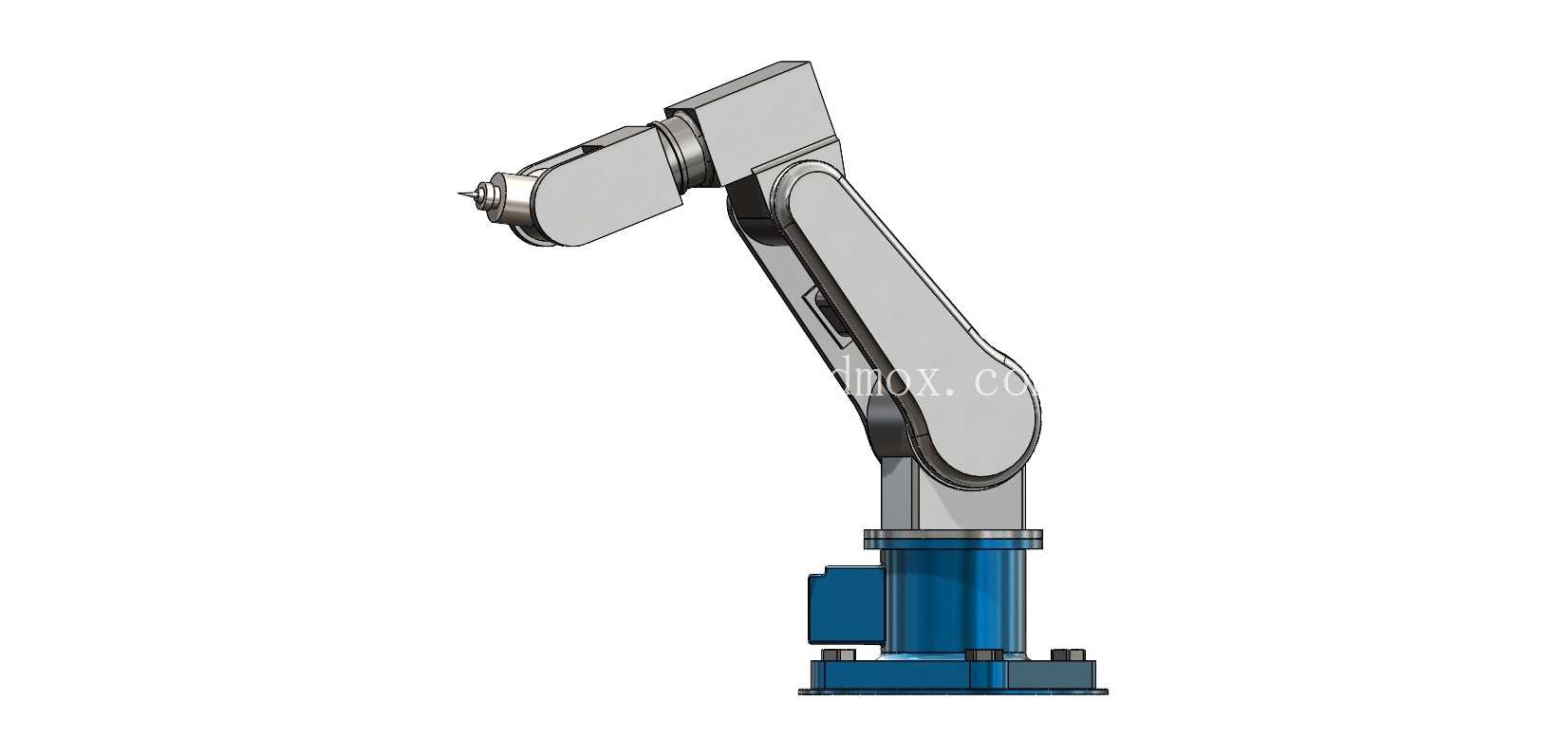
6DOF 机械臂 - SolidWorks 模型
这是一个在 SolidWorks 中设计和建模的 6-DOF(六自由度)机械臂。 该组件由旋转底座、肩关节、肘关节和腕关节组成,提供六个独立的运动轴。 该模型是为学习和练习 CAD 设计、装配建模和机器人机构而创建的。 它可用于教育目的、运动研究、机器人项目和进一步的设计修改。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,Snagit


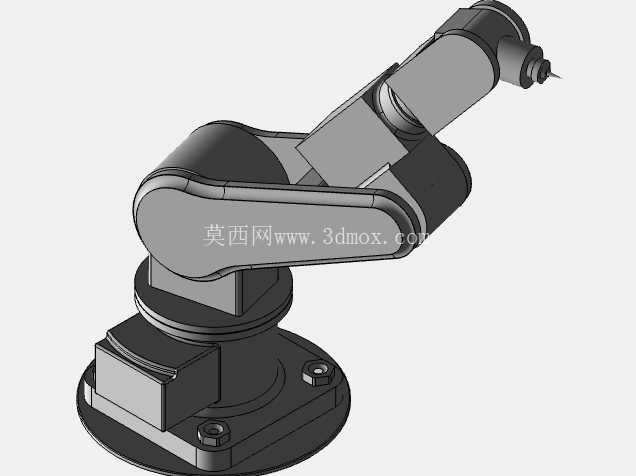

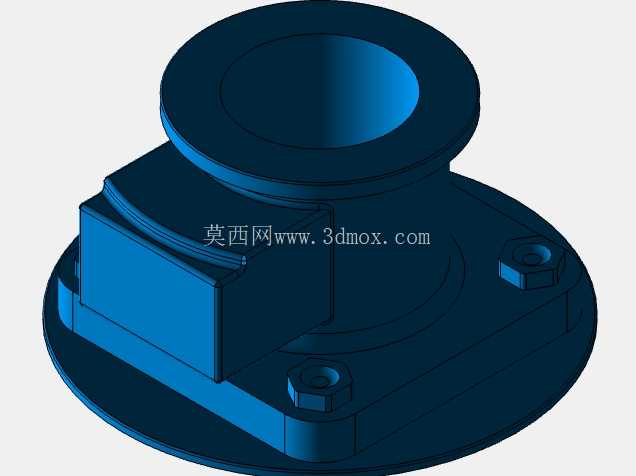
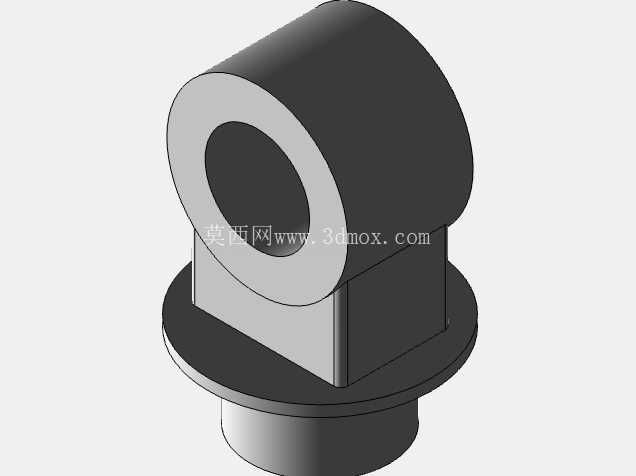
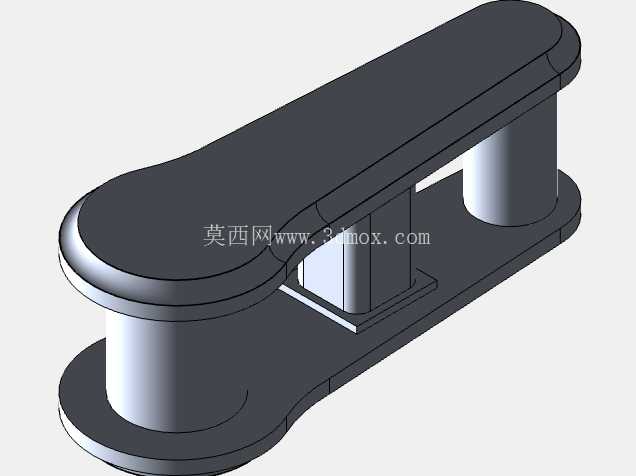
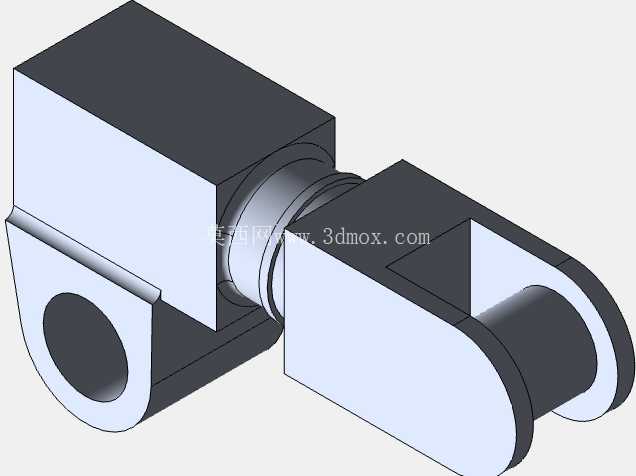
这是一个在 SolidWorks 中设计和建模的 6-DOF(六自由度)机械臂。 该组件由旋转底座、肩关节、肘关节和腕关节组成,提供六个独立的运动轴。 该模型是为学习和练习 CAD 设计、装配建模和机器人机构而创建的。 它可用于教育目的、运动研究、机器人项目和进一步的设计修改。