

罗孚Ruckus机器人(2018-19)-9970恒星像素
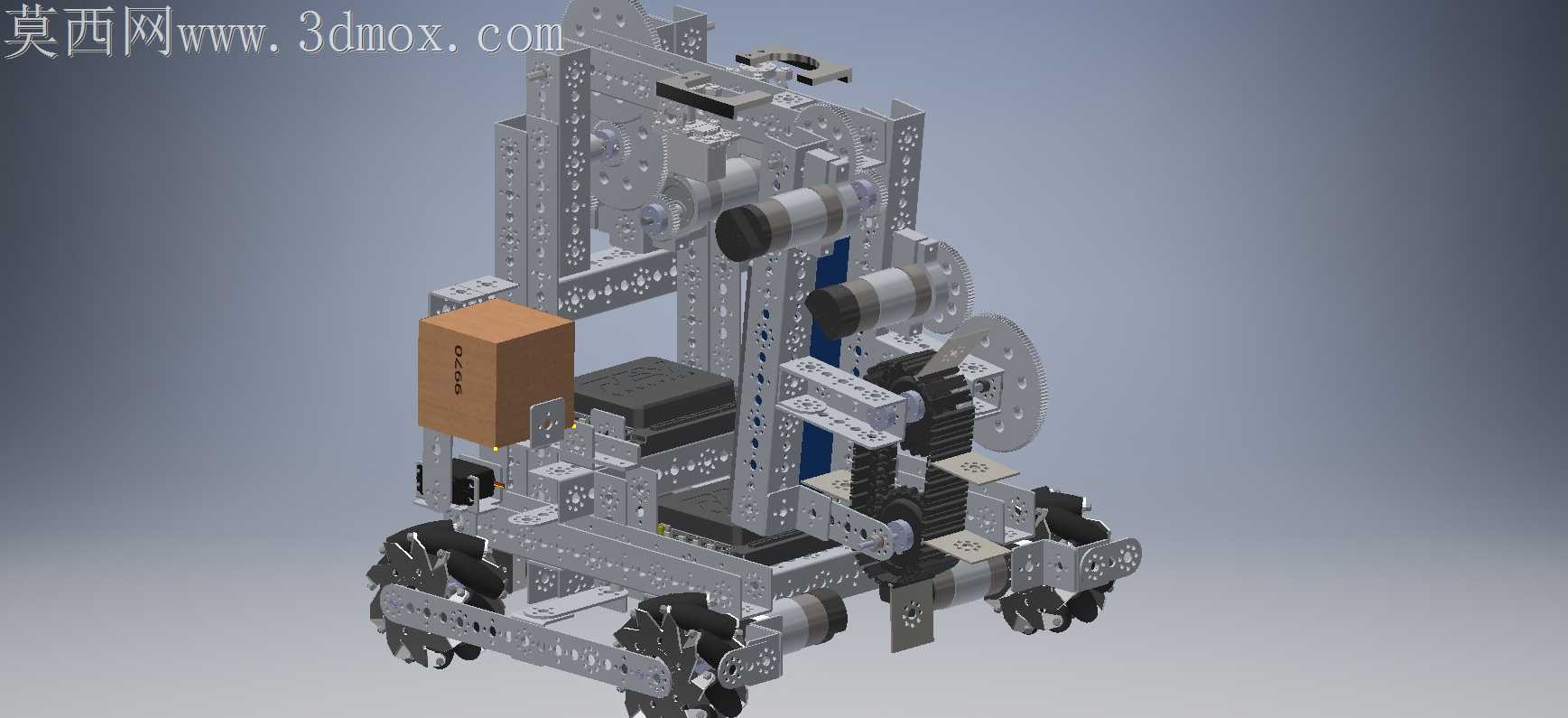
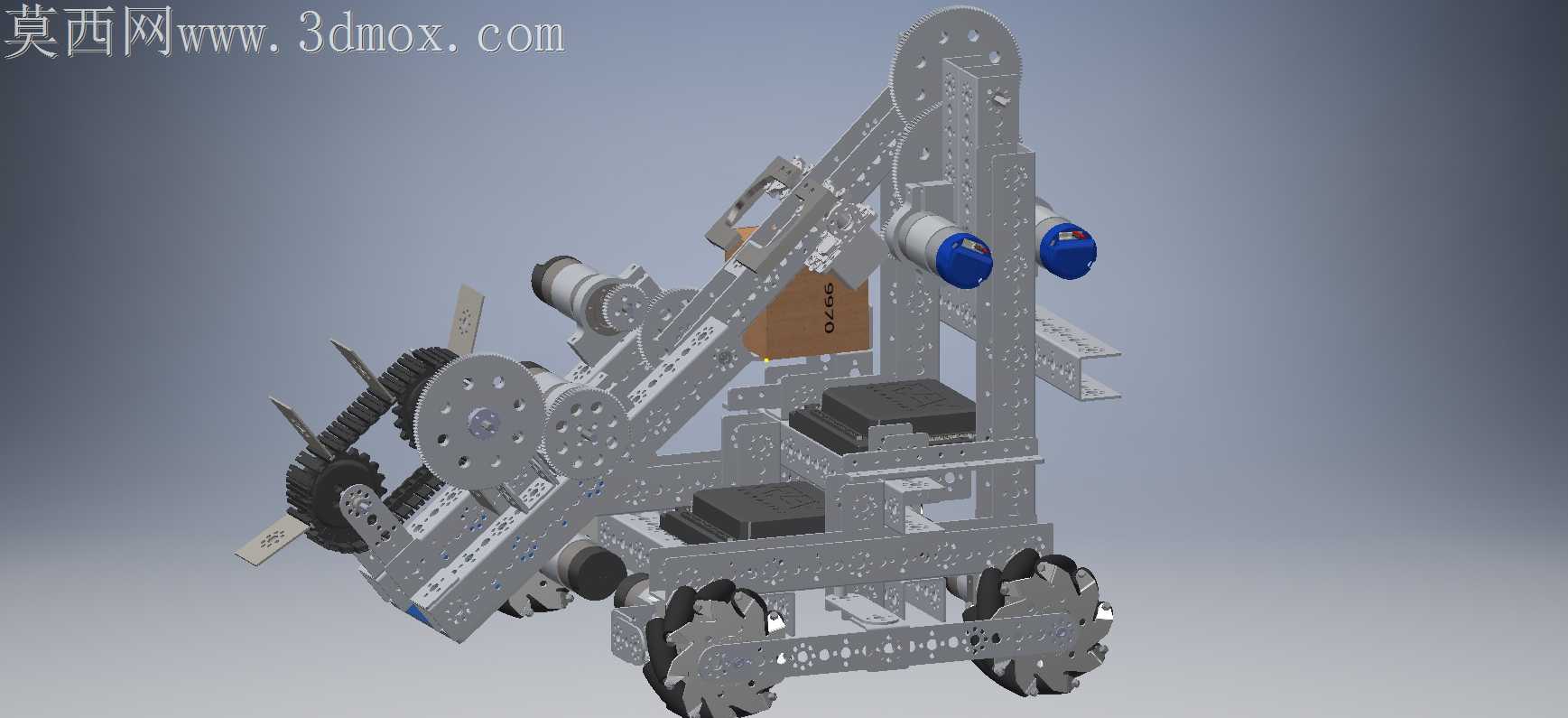
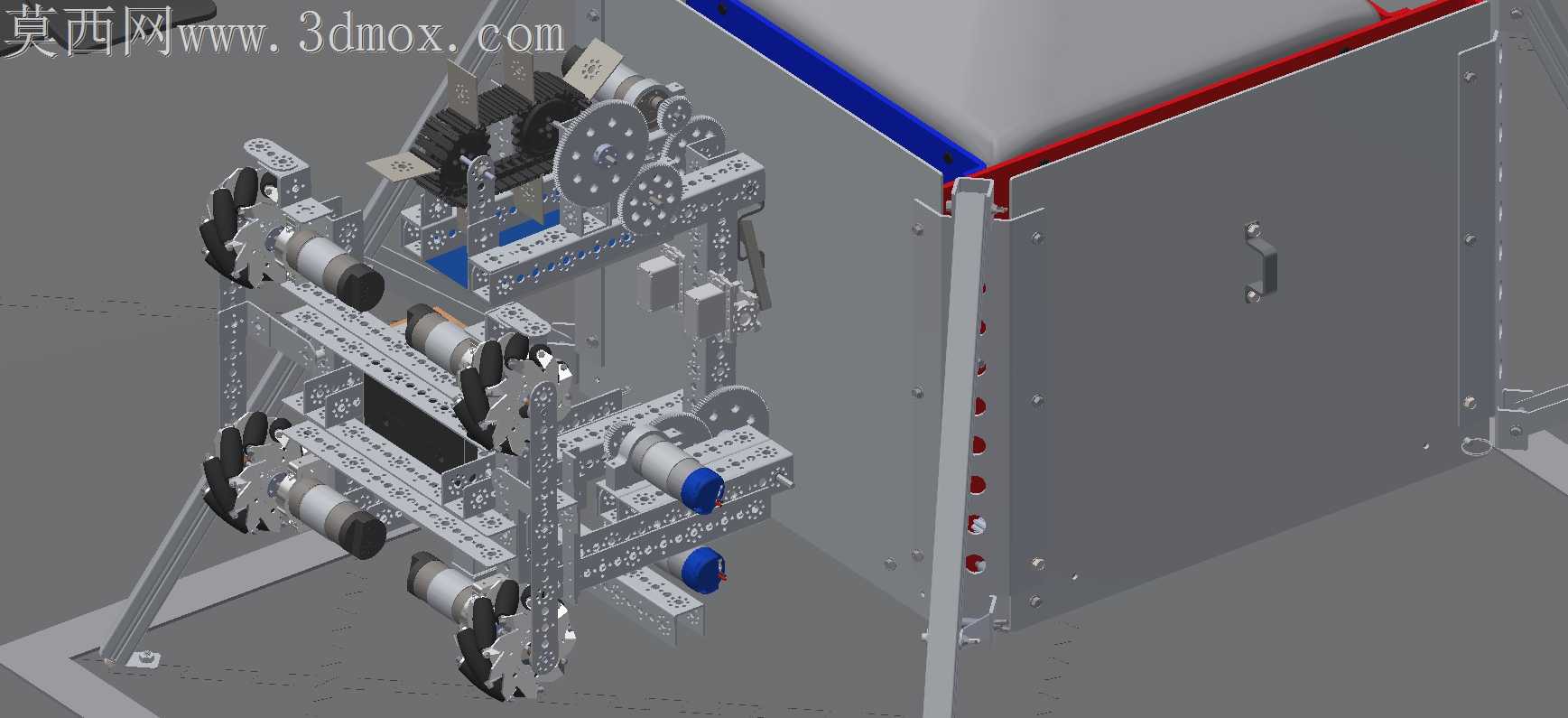



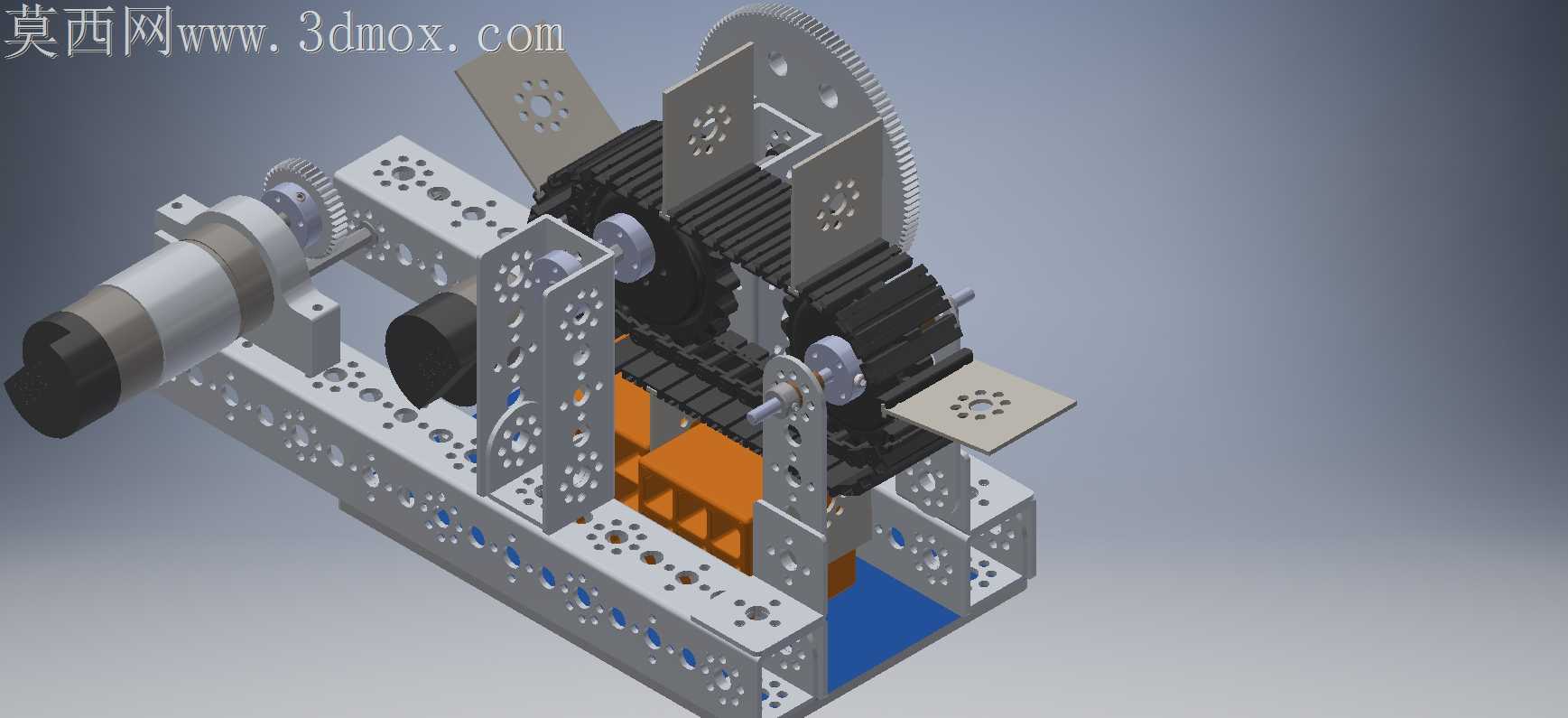
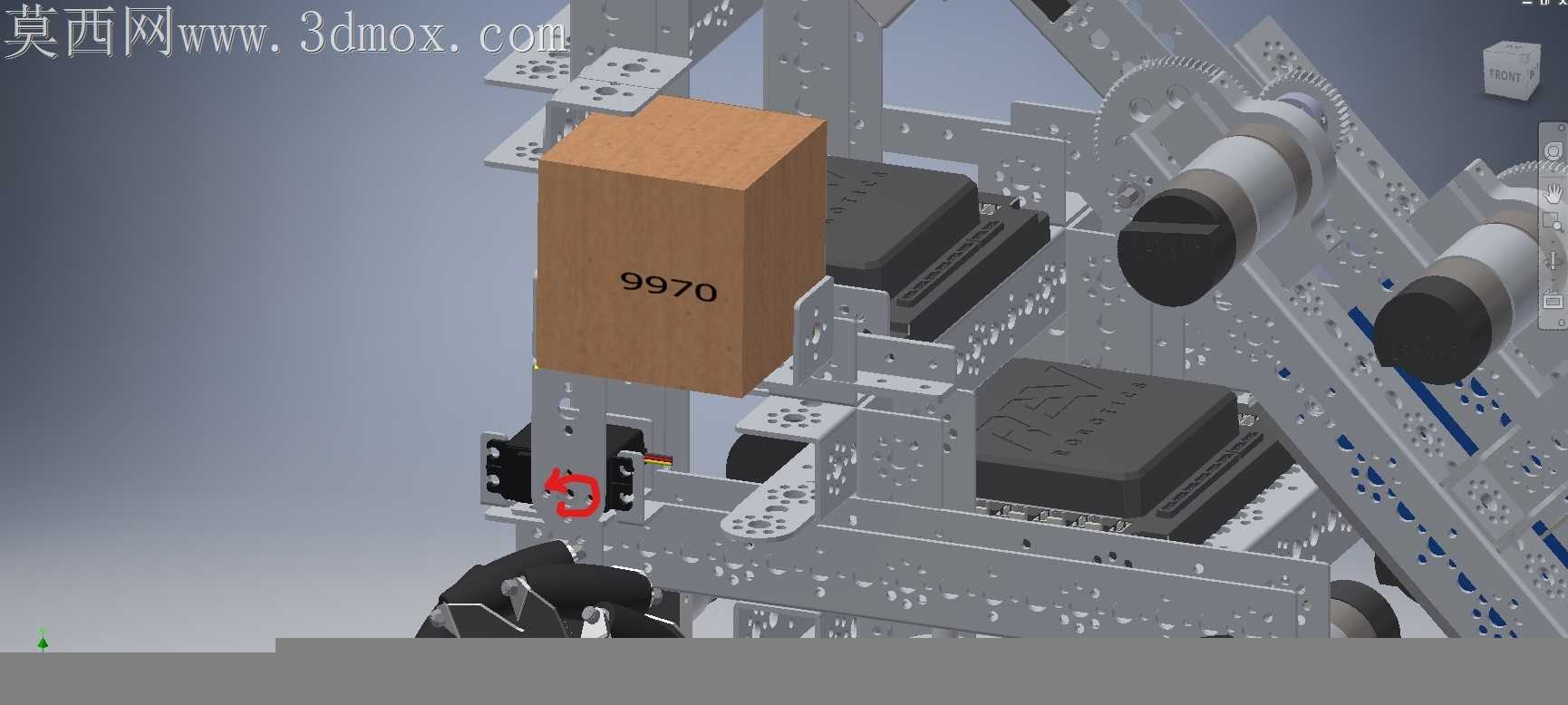
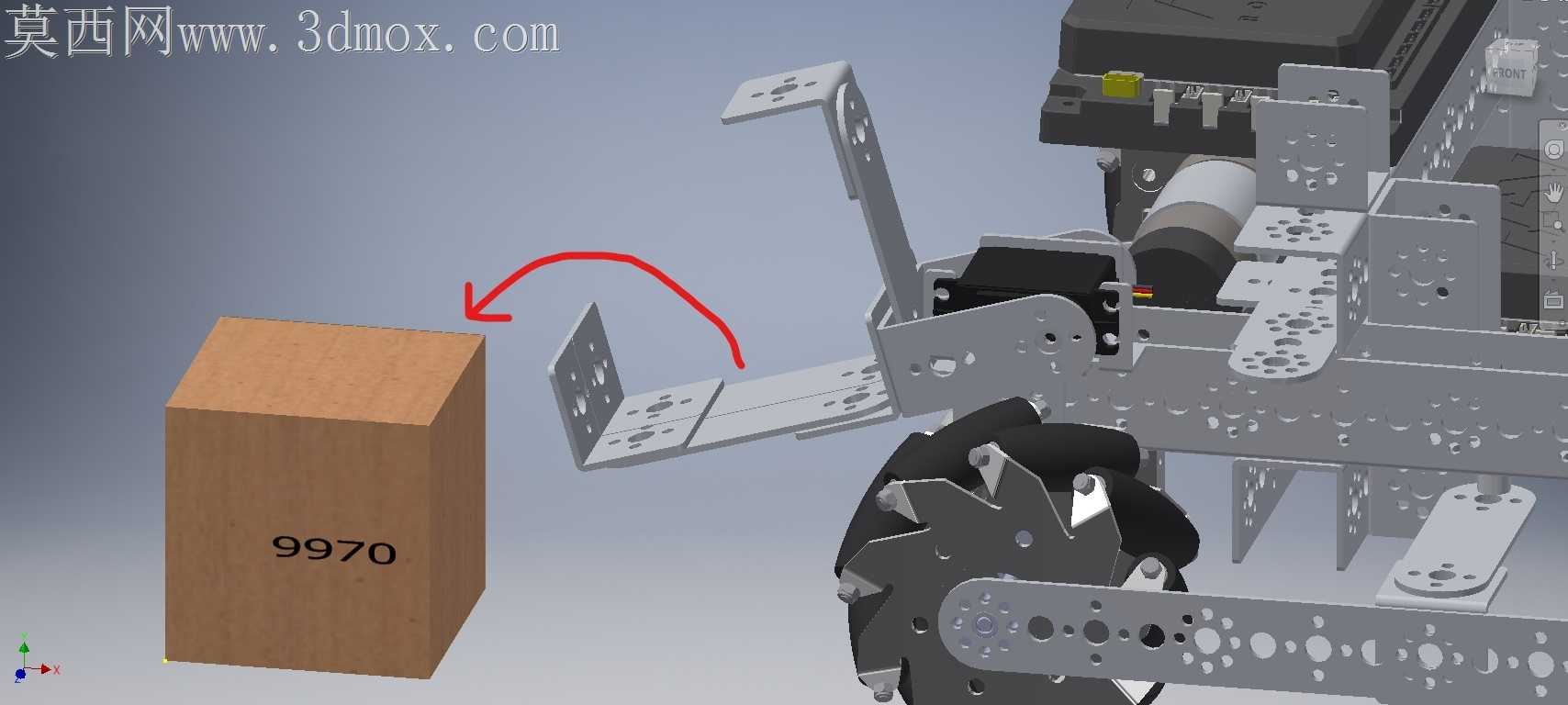
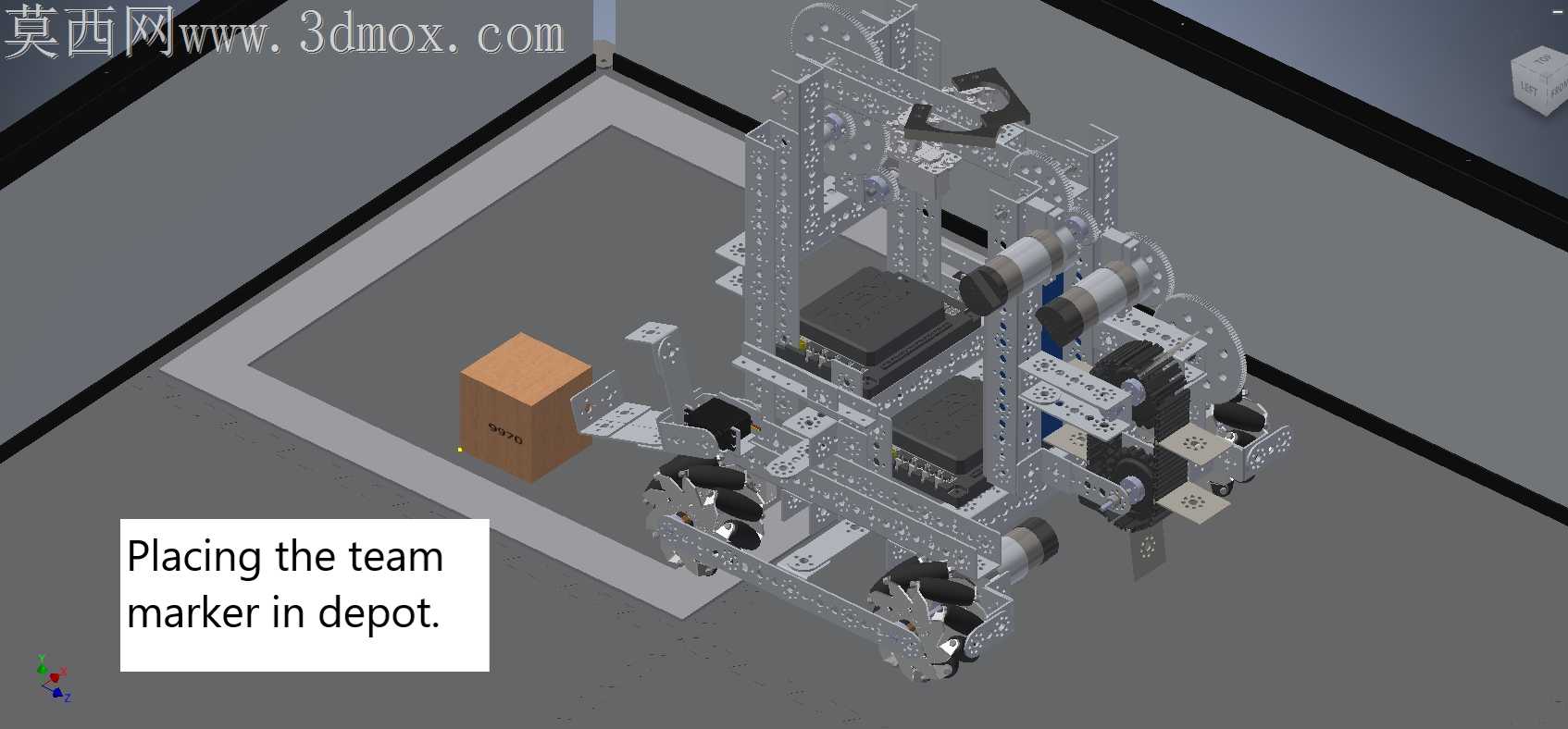
你好,这是2018-2019年罗孚Ruckus车队9970(恒星像素)机器人。此机器人尚未完全完成,请确保检查更新(我将尝试每两周更新一次)。我将机器人分为3个主要部分:进气臂(收集矿物)、齿轮总成(提升机器人的能力)和底盘(驾驶能力+团队标记展开器)。进气臂:旋转部分(前面的橡胶件)是用太力士踏板设计的,突出的白色部分是用波纹塑料制成的。我们在整个跑步机上随机添加了拉链;我们发现这有助于收集矿物质。优点:收集完矿物后,整个设计可以在翻转的过程中不会失去矿物,桨叶使矿物的吸入和排出变得容易。矿物的最大数量是两个,没有意外收集,因此,没有处罚。缺点:由于有几个齿轮可能会打滑,因此可能需要补充链条.齿轮装配:这是机器人最重要的部分。它有进气臂的附件,还有着陆器的“挂钩”。它有两个torqenado马达,它们的扭矩比Neverst60还要大。优点:它有一个成功的闭锁机制(有足够的扭矩)。它是一个多用途臂,用于着陆器和进气道武装犯:有很多齿轮,为手指制作防护罩有帮助。底盘:我们使用的是胎粪驱动轮,模型中的驱动轮与我们使用的不同,但非常接近。它里面有一个团队标记部署器,我们试着放进了进气臂,但是太大了。我们设计这个机器人是为了能够完成挑战的每一部分。有几张图片可以解释机器人的几种不同功能。如果您对模型有任何疑问,请通过GrabCad给我留言或留言。P、 请通过GrabCad给我留言或留言,告诉我你对设计、机器人的想法,或者你的解释有多好。许多谢谢。从你最喜欢的团队:9970恒星像素如果你有兴趣捐赠我们有一个go基金我页。https://www.gofundme.com/launch-the-stellar-pixels-to-stateor网站你通过Grabbad给我留言。配置文件>;消息


- 模型大小 :224.68 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STEP / IGES,Rendering,Autodesk Inventor

















