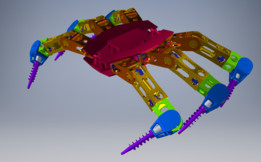
两栖五关节六足机器人
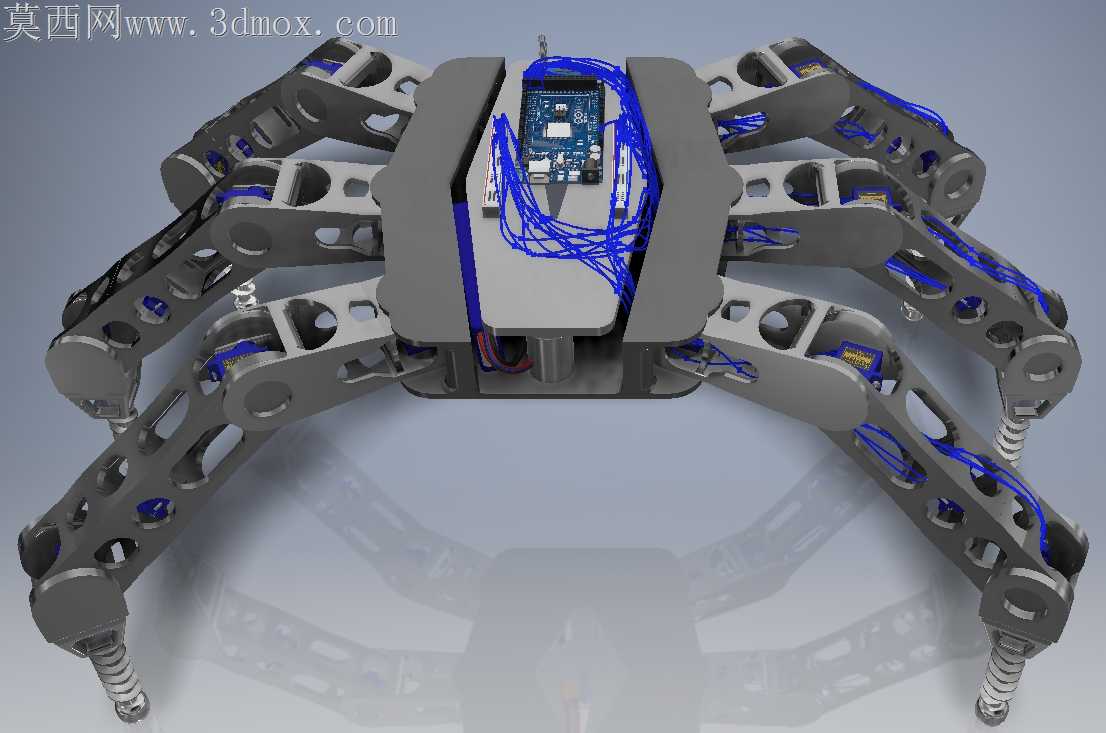

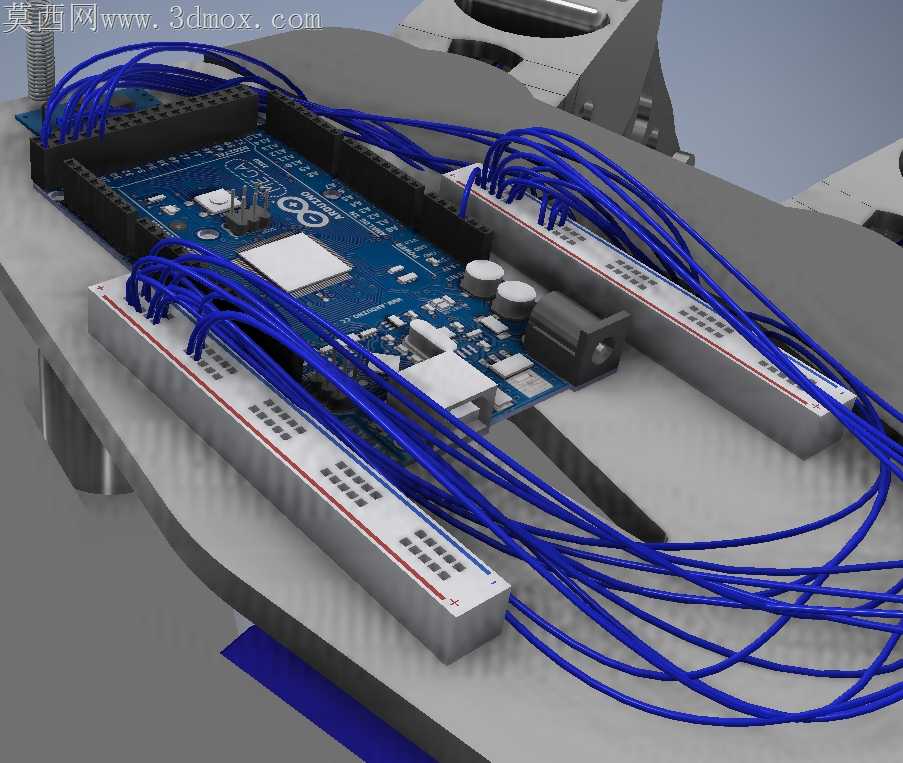
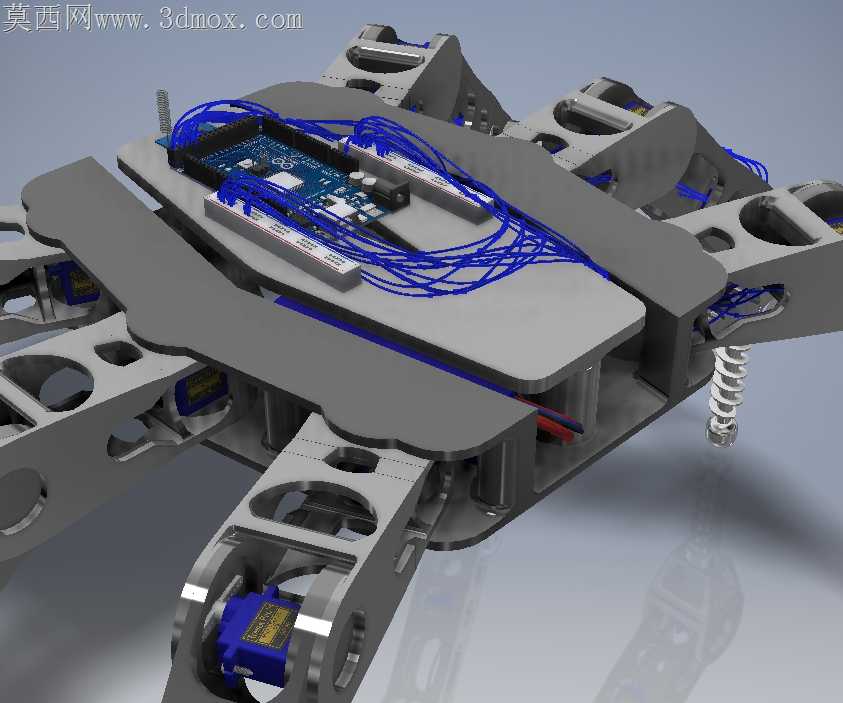
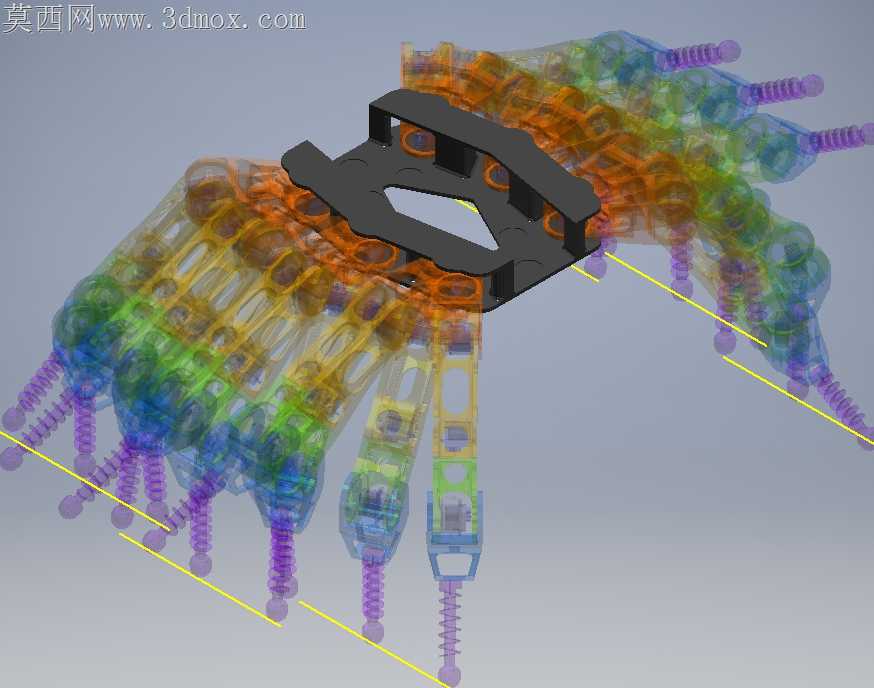


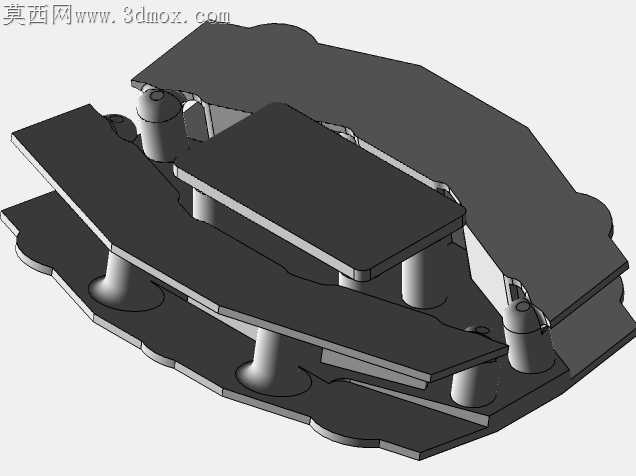
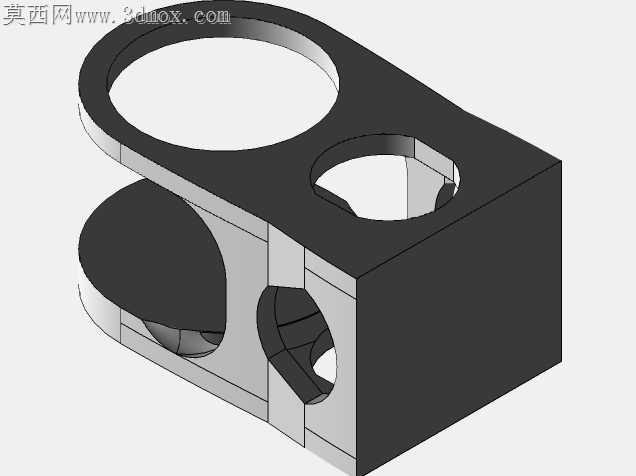




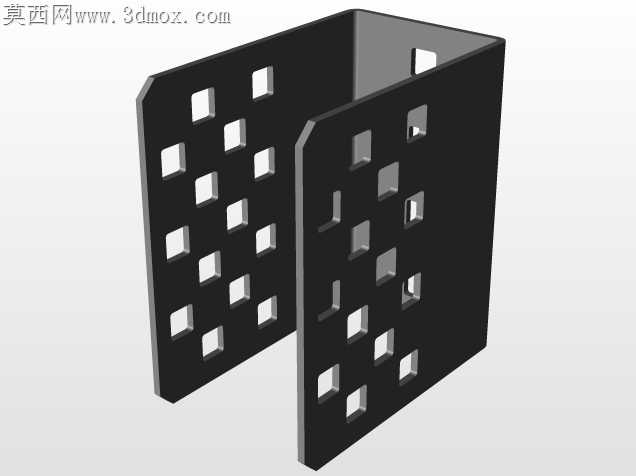






这是我的两栖五关节六足机器人的最终版本,它的设计有一个侧面的连线来显示腿是如何相对于Arduino移动的。我还提供了一张显示机器人全方位运动的图片。关于如何在inventor中连接的教程在我的页面和youtube上。这个设计是为了让你可以三维打印,虽然你将需要购买所有的电子元件


- 模型大小 :300.66 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STL,Other,STEP / IGES,SOLIDWORKS,Rendering,Autodesk Inventor