美国宇航局月球收集器
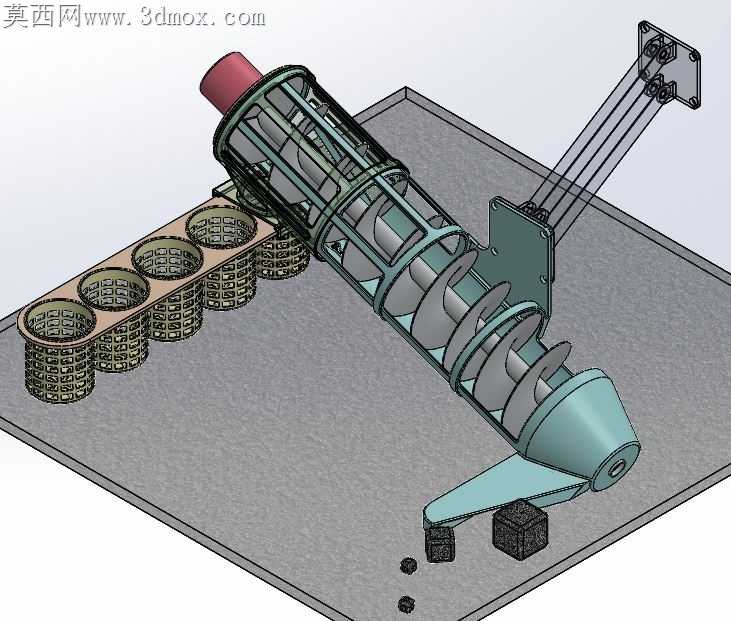
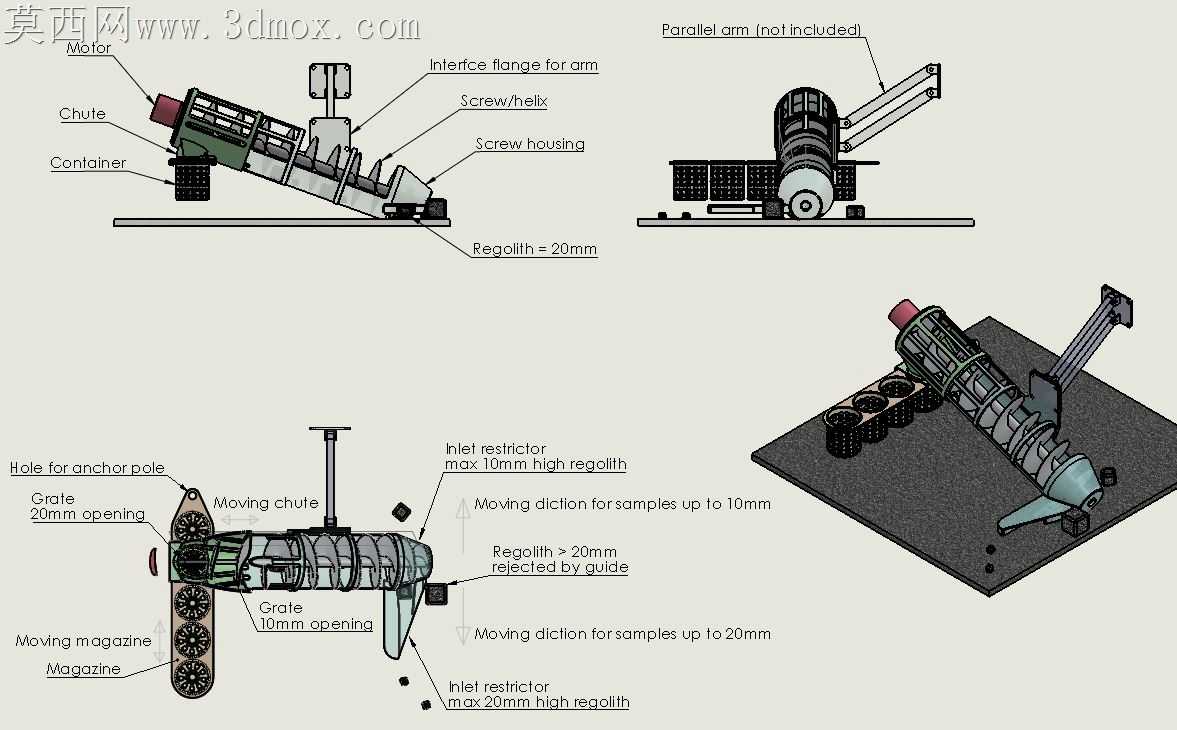
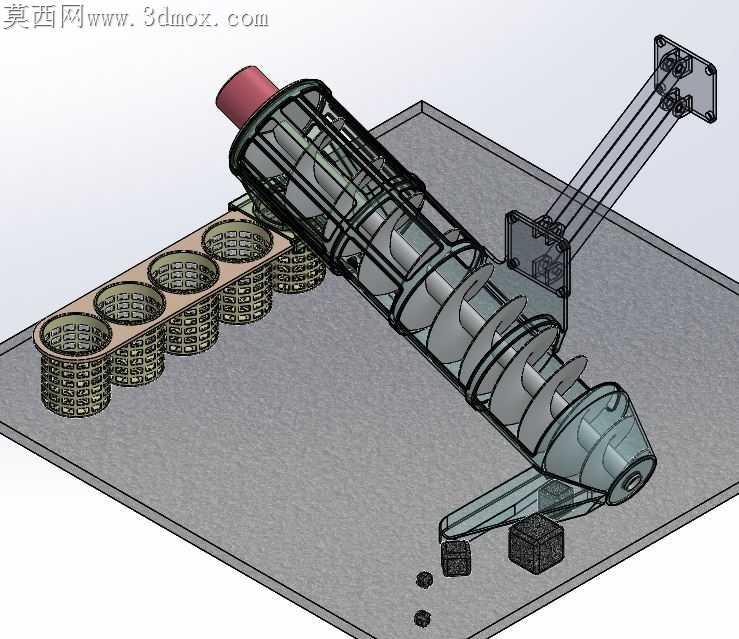
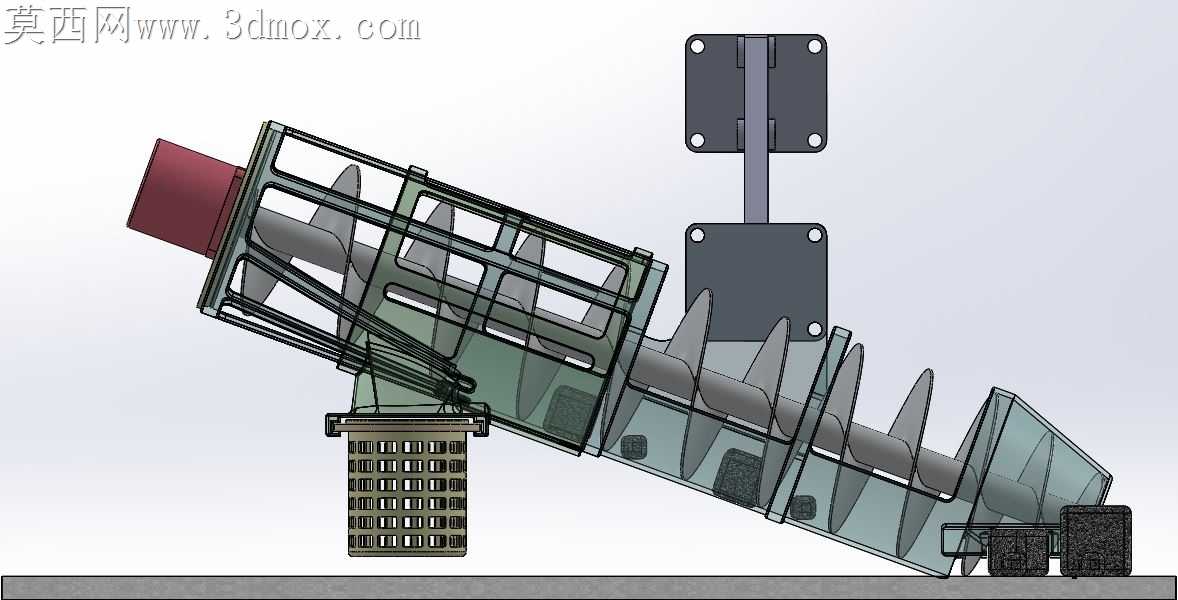
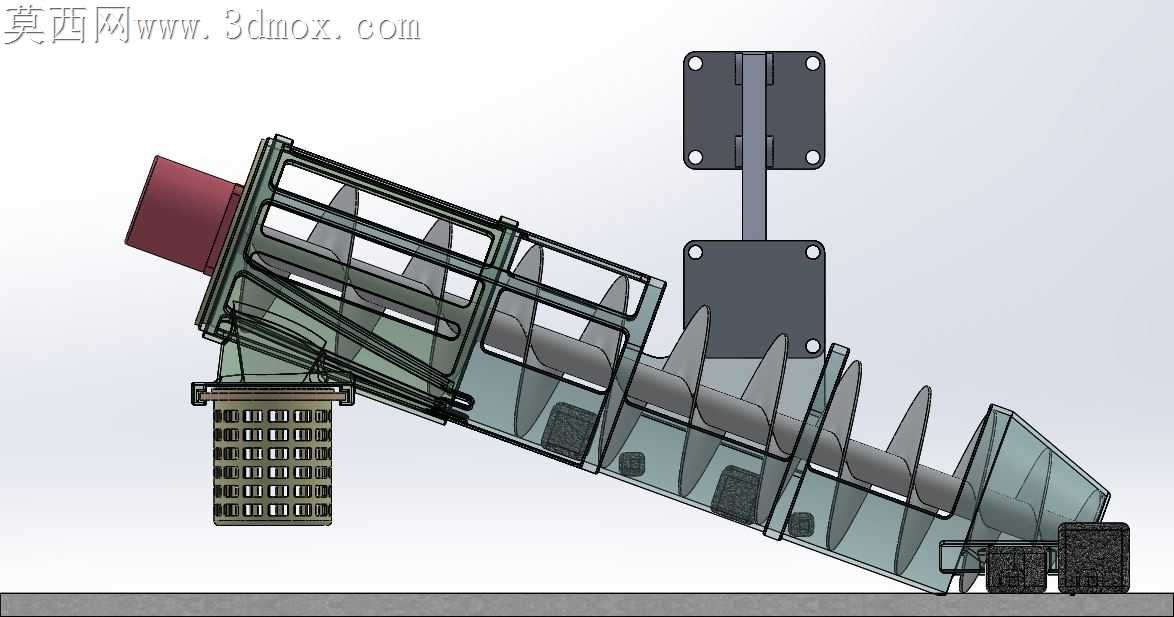
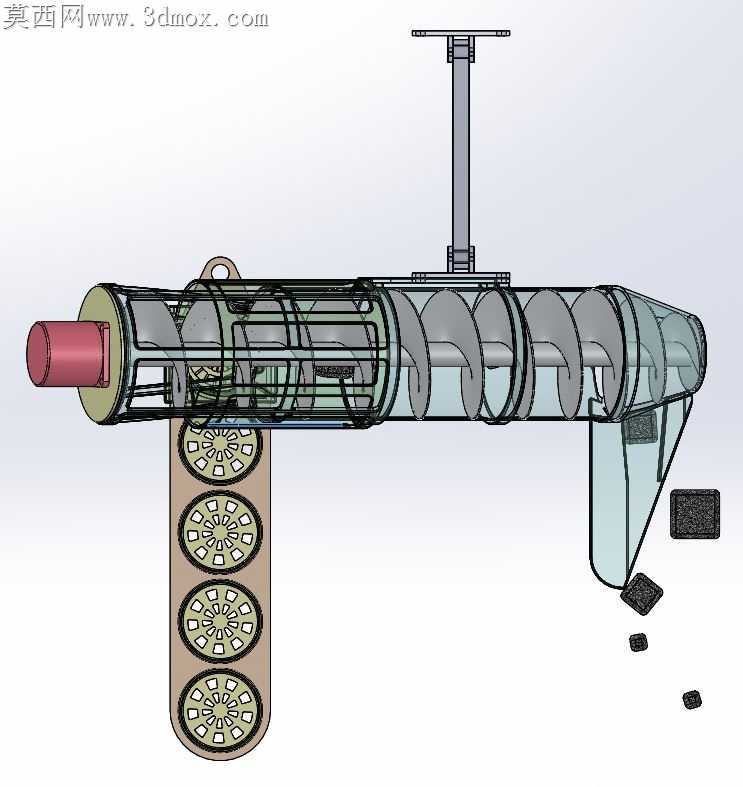
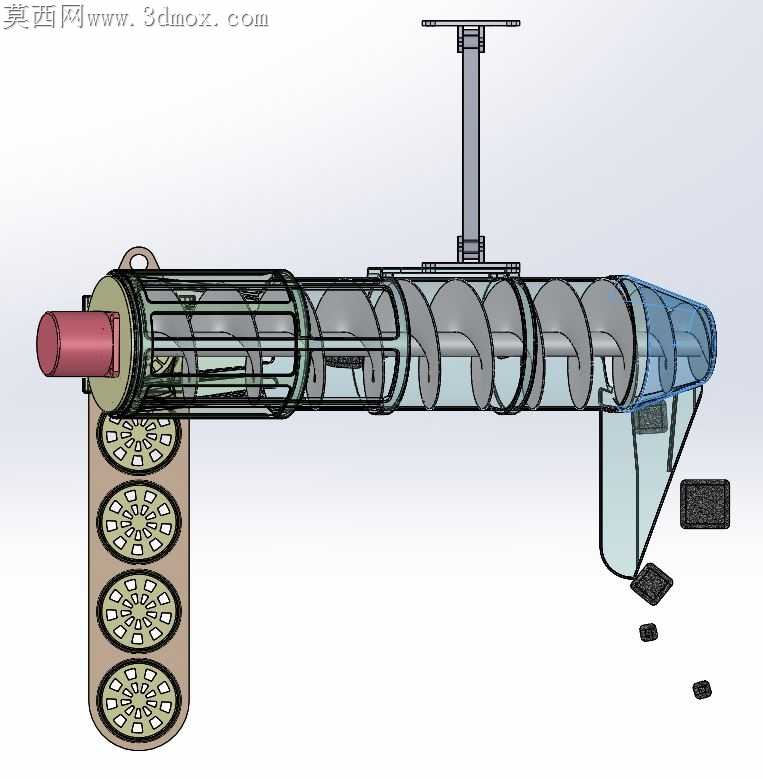
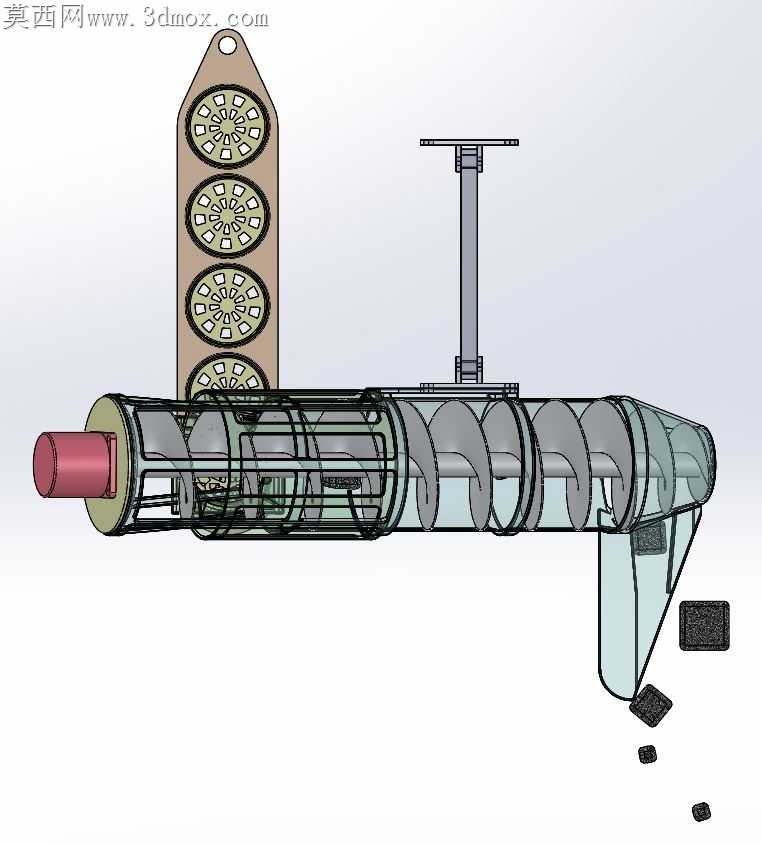
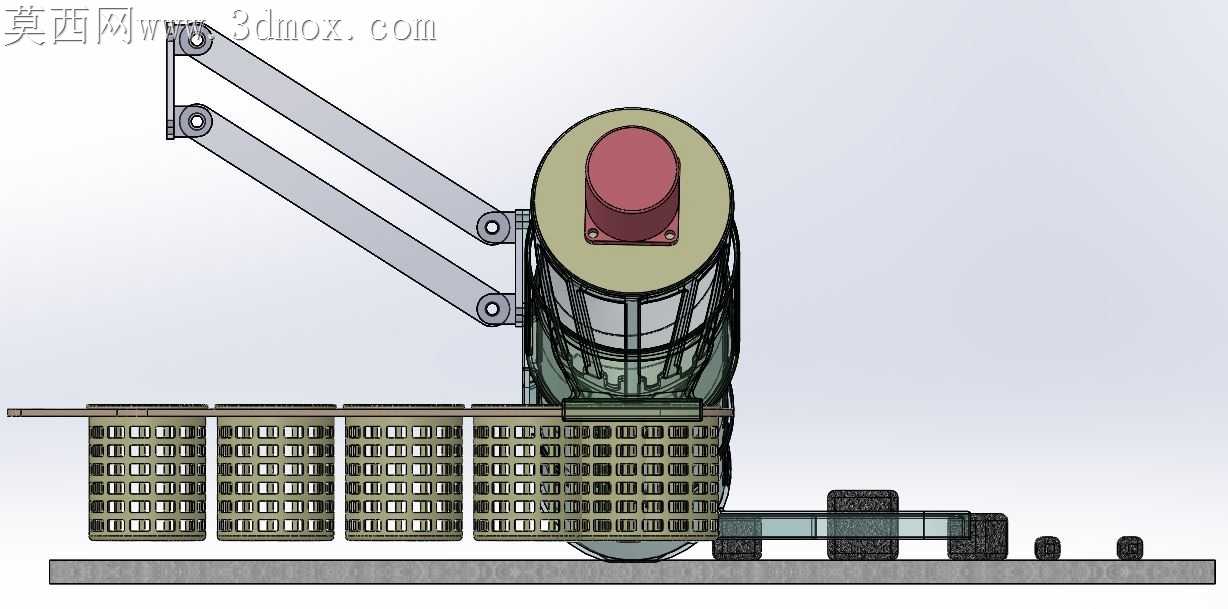
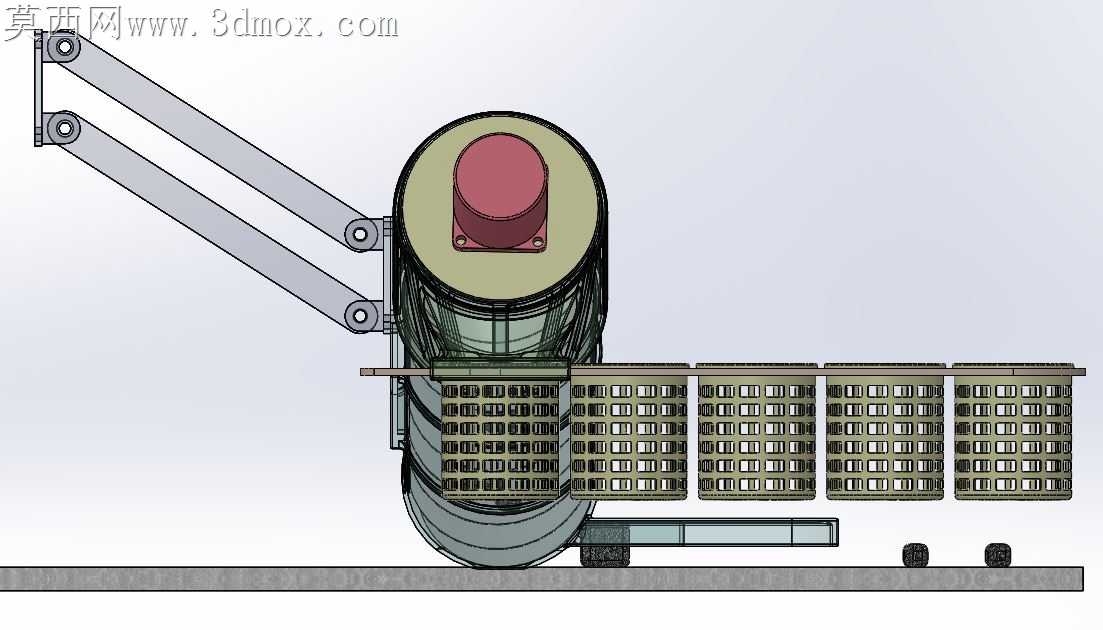







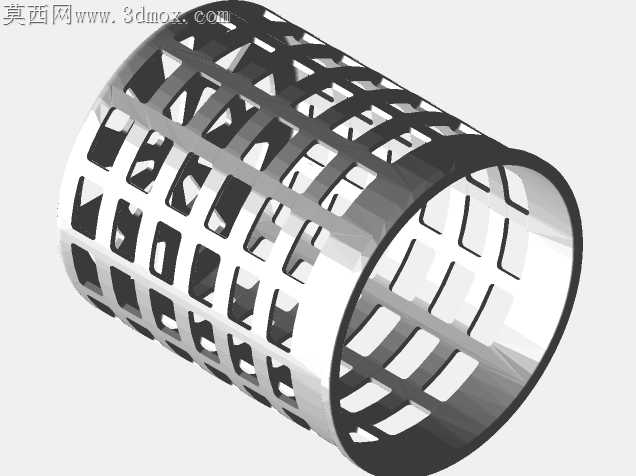
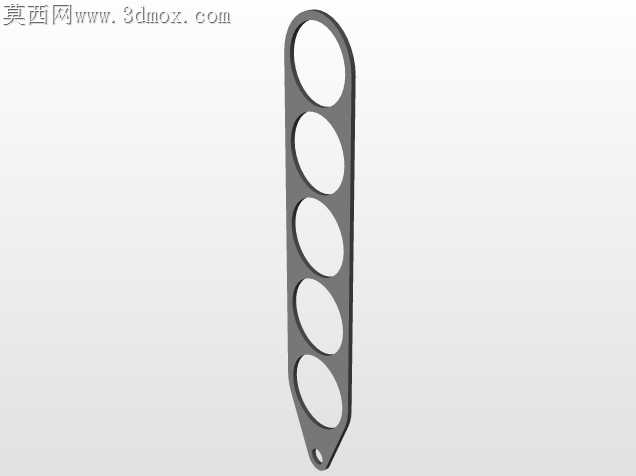
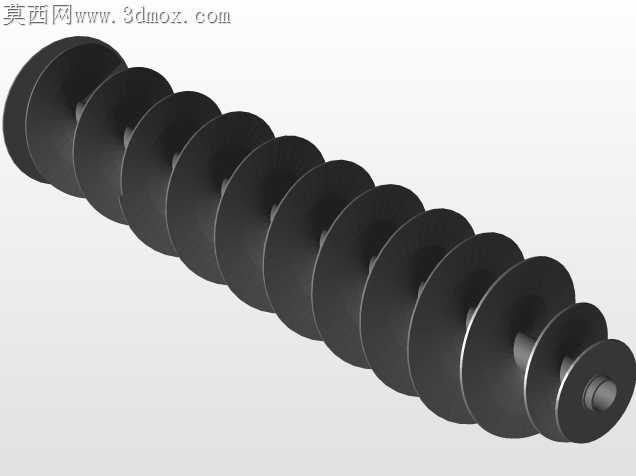
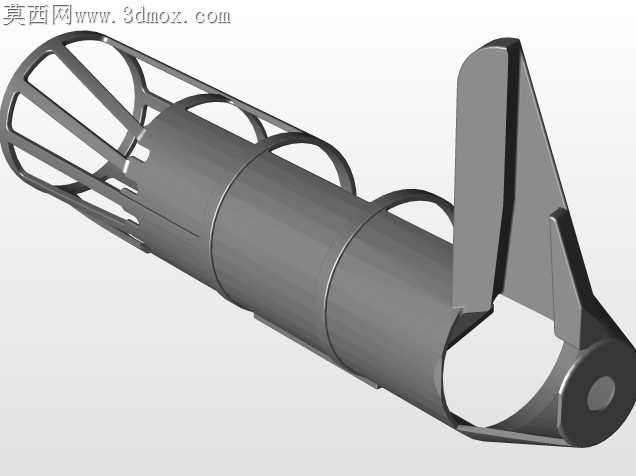
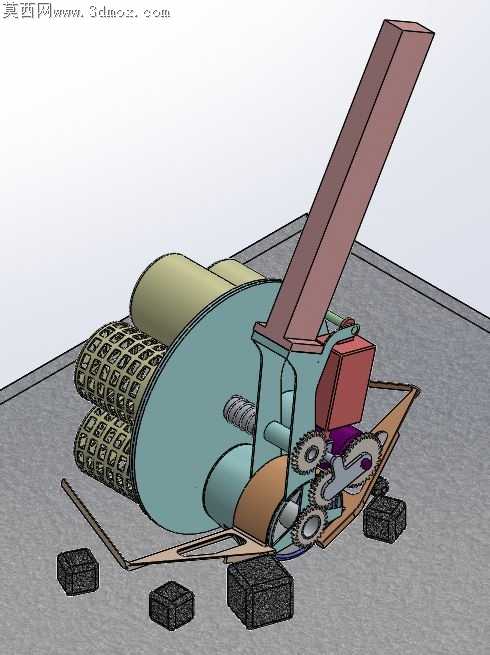
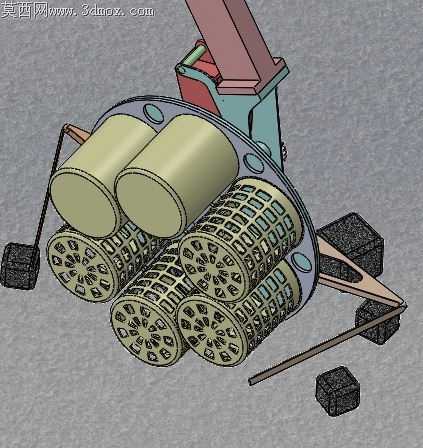
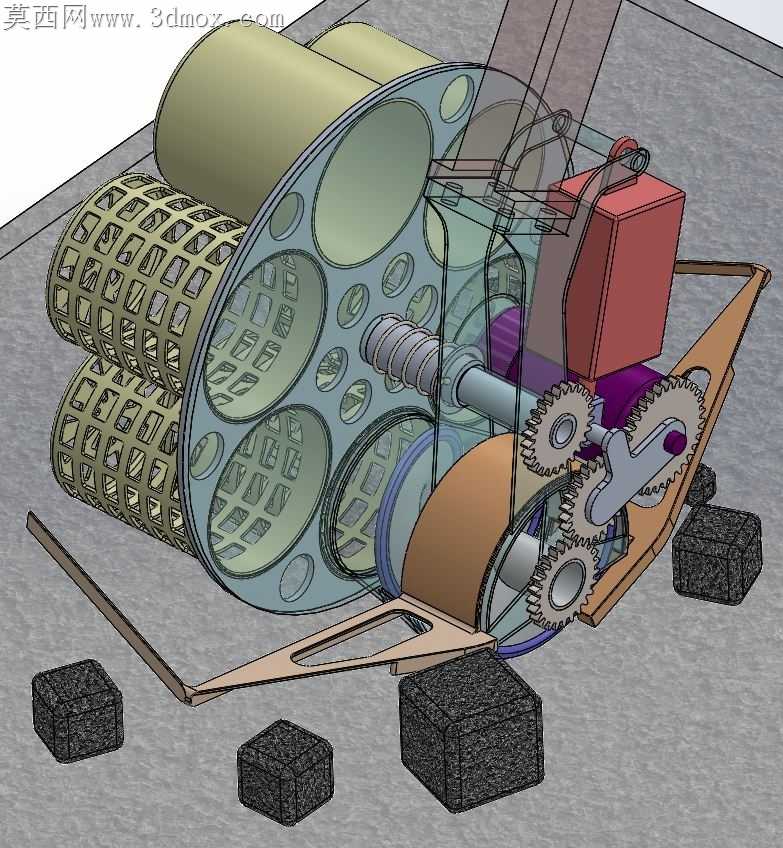
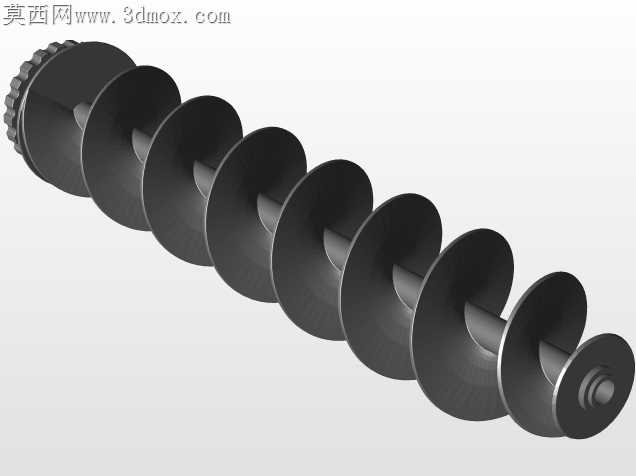
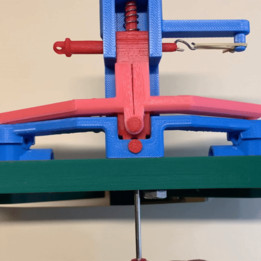
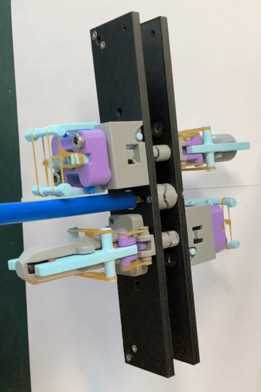
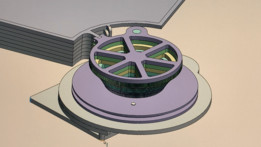
美国国家航空航天局月球取样系统先决条件:?收集器安装在着陆器或探测器装卸臂上。接口适合于臂(此处为法兰)?应插入平行臂系统,以便收集器能够与表面保持接触。由于重量原因,这不包括在重量指示中?收集器可以安装在垂直轴摆臂上,这样它可以被驱动,从而覆盖一个圆形区域?为了最小化重量,在不同容器(此处5)和滑槽位置之间切换,装卸臂用于推动集装箱行和溜槽(见下文)。但是,添加电机或执行机构来处理这些运动是非常容易的。?一名操作员正在通过摄像头监控流量,并操作手臂/收集器远程操作添加的命令30/9-2018:3D打印孔组件的半比例28/9,以测试功能,见下面的注释。-添加了一个更强螺旋线(螺旋线)的STL文件厚钢)30/9,因为缩小后的模型很弱。视频链接增加了2/10-2018内容:?斜螺杆/螺旋(20度),具有渐进螺距和锥形端。螺钉的外缘装有由特氟龙制成的软边,以达到一定的刮刀效果。?螺纹管外壳设计为开放式,可以通过螺钉跟随岩石的运动。入口将限制岩石的大小。前开口允许20x20mm,后开口允许10mm高的岩石,因此根据哪个方向,取样器在表面上移动,两种不同的限制有效。更大的岩石被引导离开开口孔。?一个位于螺旋管末端的分选格栅作为其中的一部分。炉排的纵向肋的距离越来越大,因此小石块会在其狭窄的一端穿过炉排,而较大的石块在穿过炉排之前会被进一步引上。通过将斜槽推向入口收集非常小的岩石和沙子。?可以沿格栅纵向移动的开放式斜槽管,以便斜槽开口可以放置在所需格栅开口的下方,从而可以将大小不超过格栅尺寸的石头进入容器。?一个容器库,其中容器(这里是5个)可以放进去。弹匣放在滑槽开口下方,可以滑动,以便每个容器都可以放在滑槽下方。?5个顶部有止动边缘的容器,安装在弹匣中。?一个电机/驱动系统,用于旋转固定在螺钉外壳端部的螺钉。如果可能堵塞或需要排空螺钉,可以向后旋转。可能可以间歇驱动以避免阻塞。?在装卸臂和集电环之间安装一个平行臂系统,确保集电环入口始终以正确的方向与地面接触。这样的话,操作员可以集中精力使收集器的入口穿过地形以搜寻石头。说明:?收集器夹在/点击探测器或着陆器装卸臂上。?收集器已尽可能打开,以便从摄像机监控整个过程。?操作员引导臂/收集器打开在要收集岩石的表面上方。?螺杆旋转并拉动能够通过入口开口的限制性开口的石块和罗音。?当石块接近螺杆外壳的上端时,它们通过一个分选格栅。?根据溜槽在格栅下方的位置,石块正确的尺寸将落入容器中。溜槽根据需要的岩石尺寸移动,可通过摄像机观察到。?如果需要大型物品,溜槽从入口滑出,如果需要小型岩石,则将溜槽推到入口。?溜槽和容器的设置以着陆器臂为末端开口在固定的锚柱上操纵刀库板。移动臂时,固定刀库将相对于滑槽和螺钉外壳移动。一旦达到所需的设置,整个采集器将从锚中释放,从而准备好使用新的设置。选项/性能:?可以在相当不平整的表面上工作,因为入口开口有一个相当小的接触点。在平坦或波浪形表面上效果最佳。?增大横截面->夹紧机会更小?易于移除装满的容器盒?功耗非常小(仅一台电机)?结构简单->;较少问题(KIS)数据:?大部分结构由铝制成?总重量(不包括电机):小于1000克?集热器在标记锻造的X7(结果显示在图片中)上打印3D(尼龙玛瑙,比例1:2,0.125mm层),因此墙壁比铝制成的墙壁厚。它的功能似乎还可以,但打印今天下午刚刚完成,所以我还没有测试。?上传的STL文件是1:1我还添加了一些我的第一次尝试的照片,这是非常紧凑和轻(不到500克:-)我想它也会很好的功能


- 模型大小 :13.14 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Other,Rendering