机器人运输
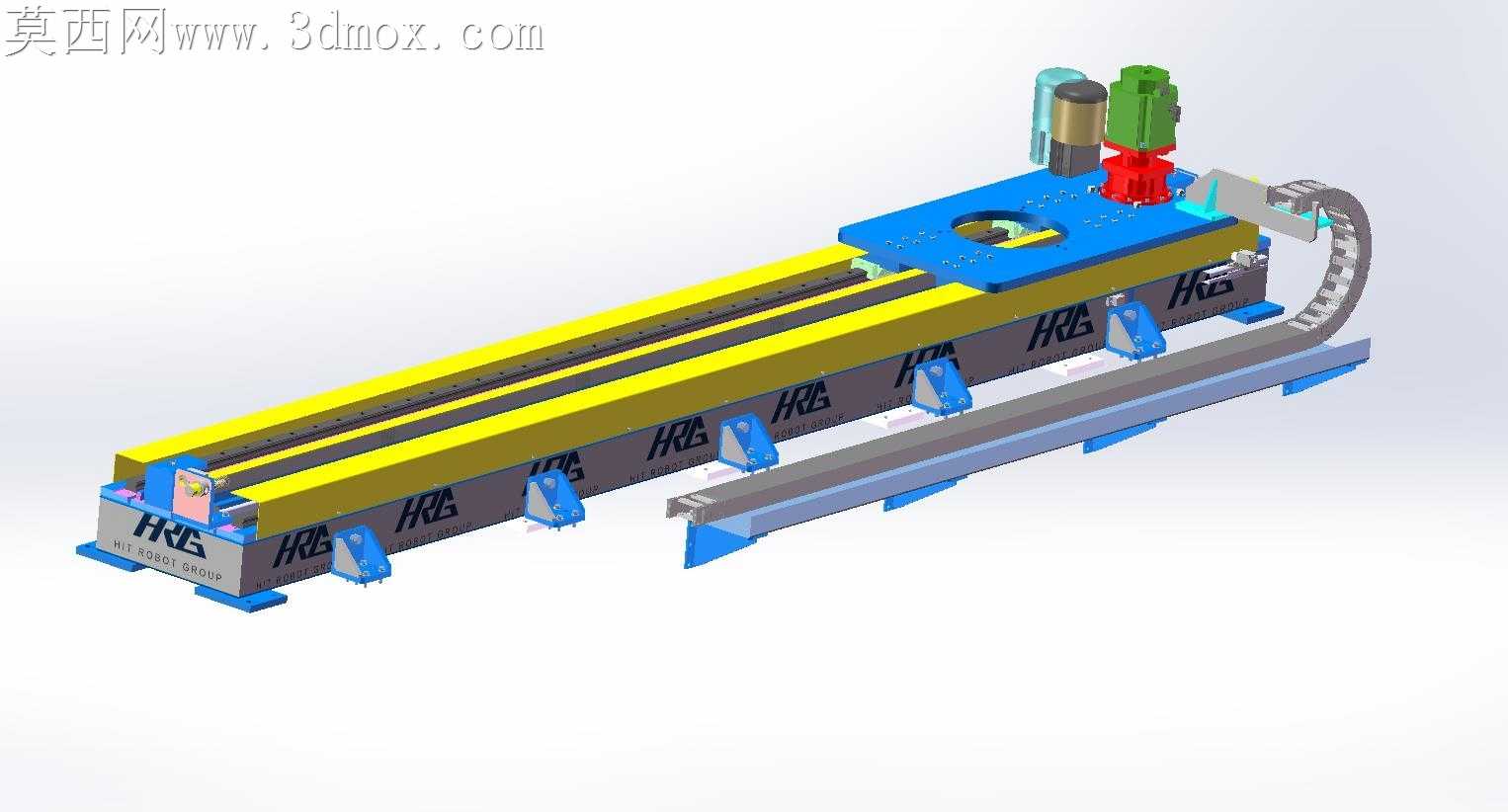
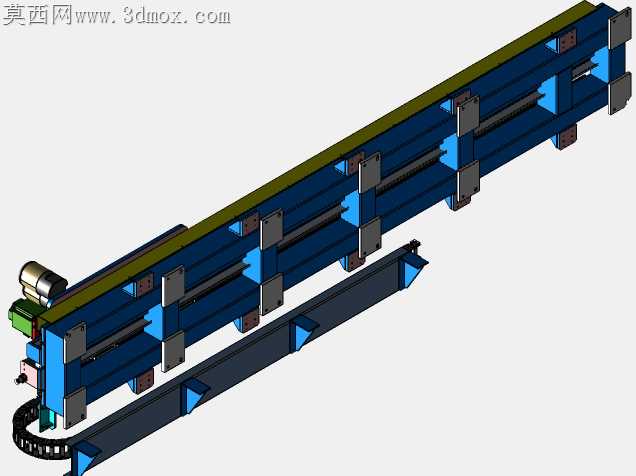
1。最大载荷:1000kg;2。有效行程:≥3500mm3。最大速度:1000mm/s;4。重复定位精度:±0.1mm;5。定位精度:±0.2mm;6。实际载荷:350kg;7。传输方式:机架和小齿轮8。总长度和宽度不超过5000x600mm9。固定板采用ABB2600机器人,固定板离地400mm。底座采用M16预埋螺栓固定孔固定。采用拖链+拖链槽,拖链需与机器人IRB2600柔性电缆相适应,且拖链可拆卸且完全密封。伺服电机:ECMA-E11820SS 2000W
标签:


- 模型大小 :38.19 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering