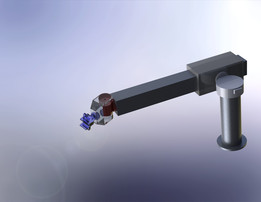
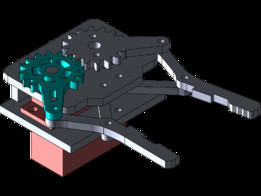
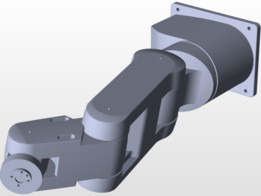
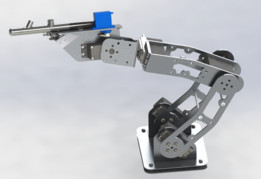
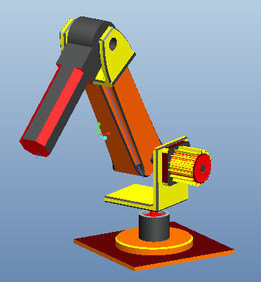
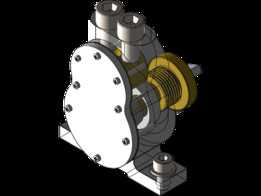
机械臂T310(6自由度)

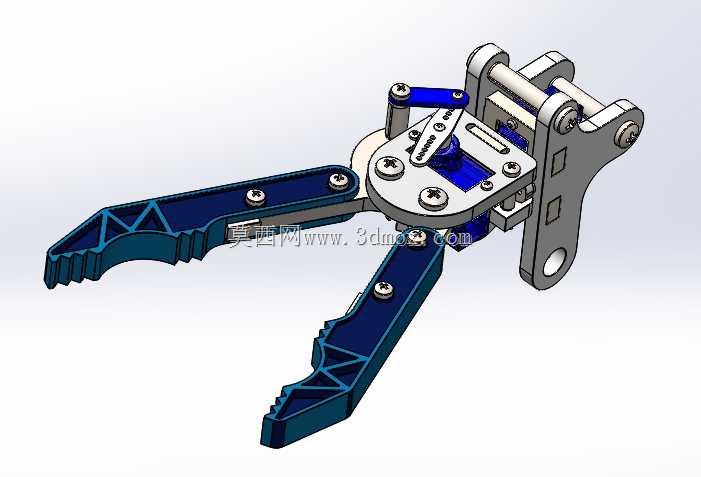
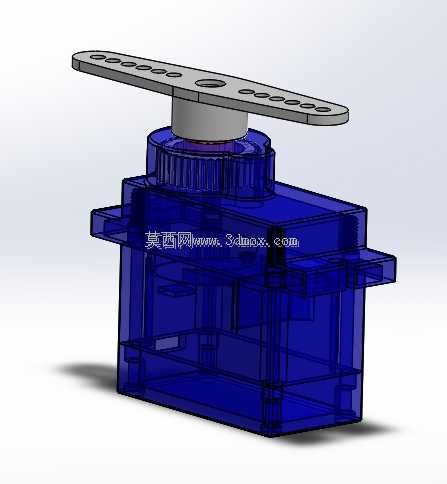
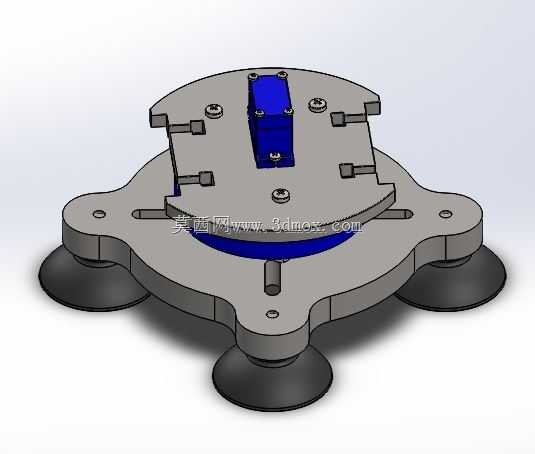
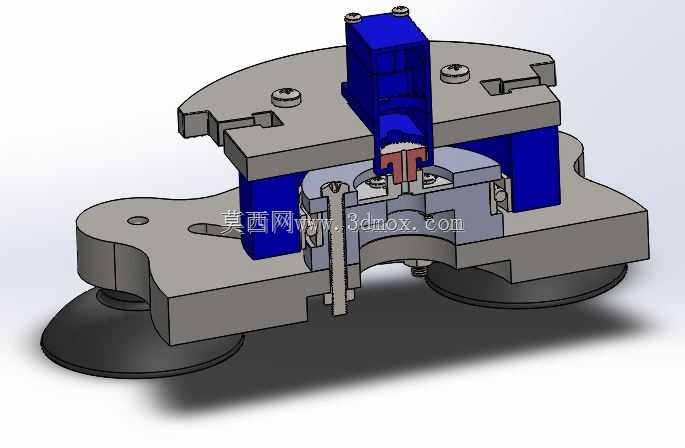
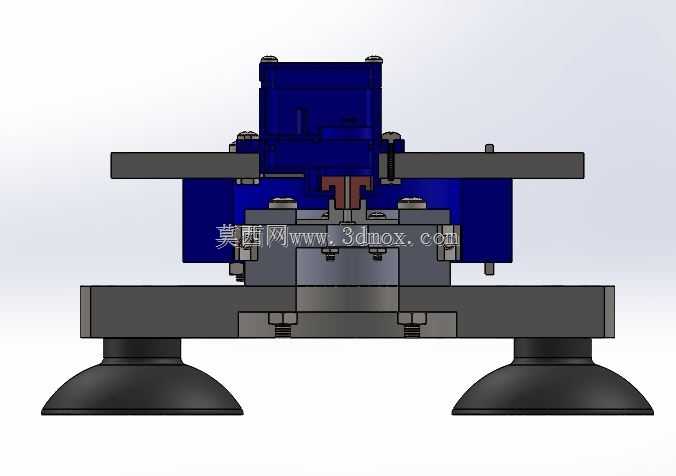

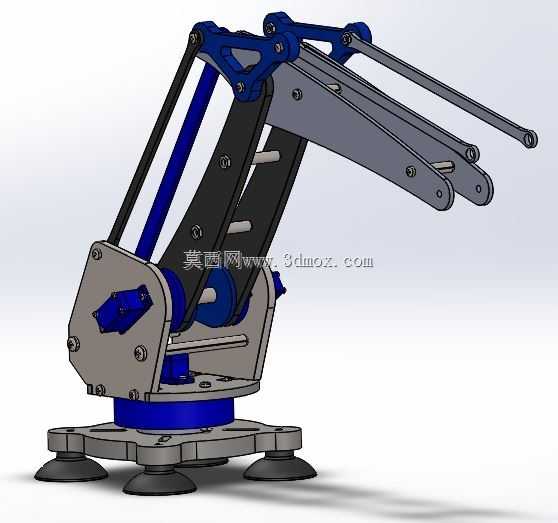

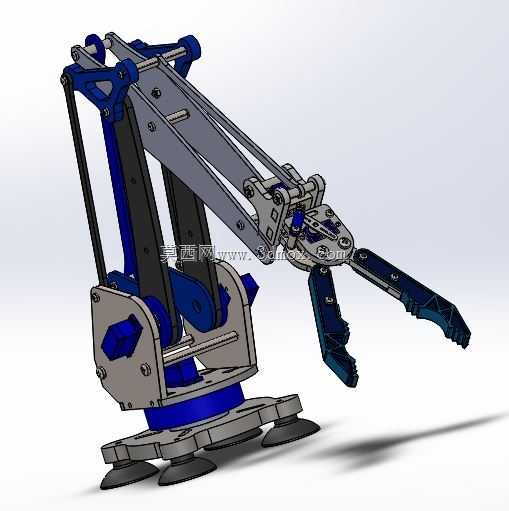
















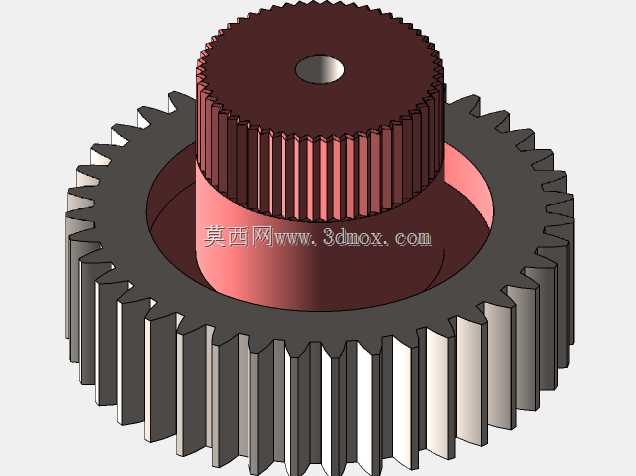
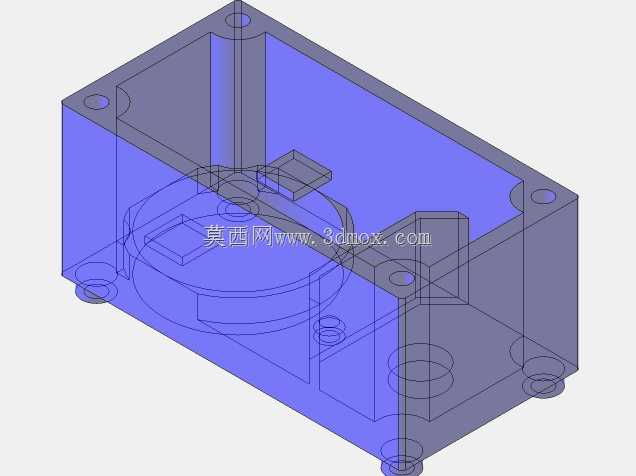
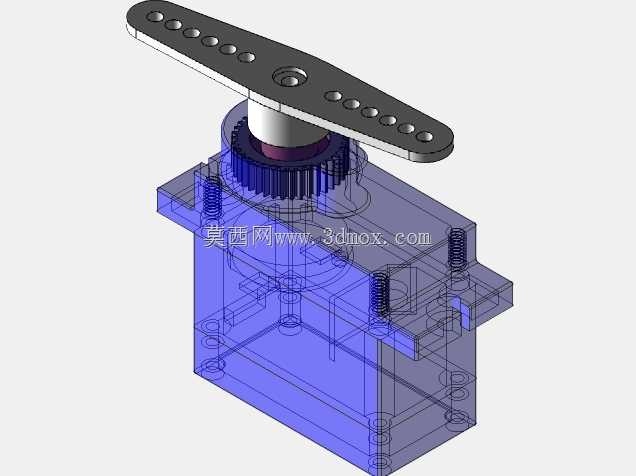
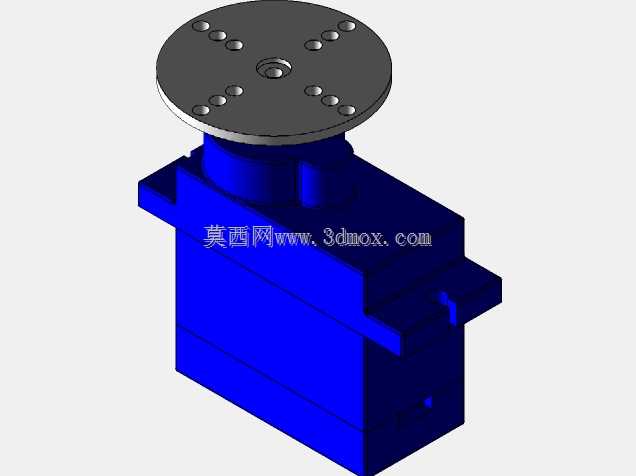



机械臂是一种机械臂,通常可编程,具有与人类手臂类似的功能;机械臂可以是机械装置的总和,也可以是更复杂机器人的一部分。这种机械手的连杆通过允许旋转运动(例如在关节式机器人中)或平移(线性)位移的关节连接。机械手的连杆可以看作是一个运动链。机械手运动链的末端称为末端执行器,类似于人手。1设计在Solidworks2016.2中完成。包括夹持器和伺服的文件。三。模型是用螺丝钉完全固定的。4可以清楚地观察到所有部件的运动。它是在Solidworks教程的帮助下创建的。我所面临的问题得到了解决和调整,以得到一个完整的运作模式。本教程的链接是为您提供的


- 模型大小 :24.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,Parasolid,Parasolid,Parasolid,Parasolid,Parasolid,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Parasolid,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,Parasolid,Rendering,SOLIDWORKS,SOLIDWORK