机械手
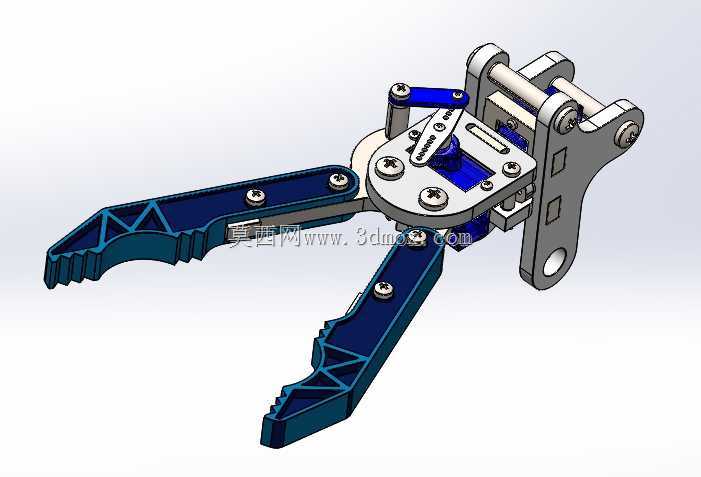
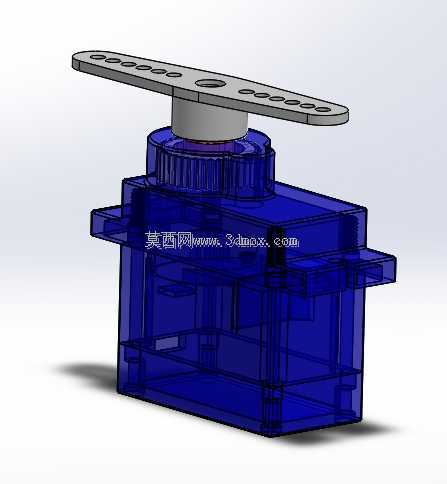
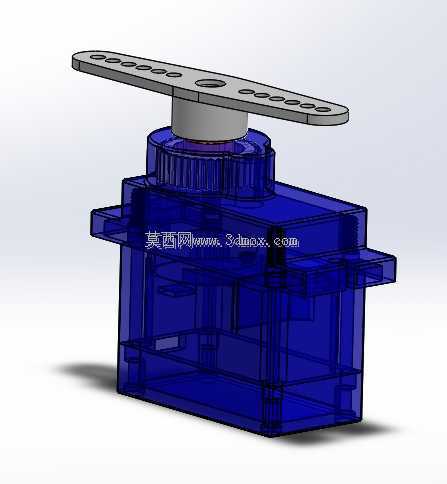

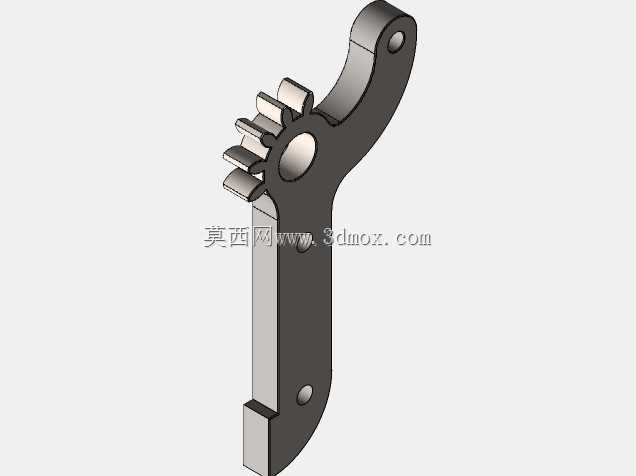

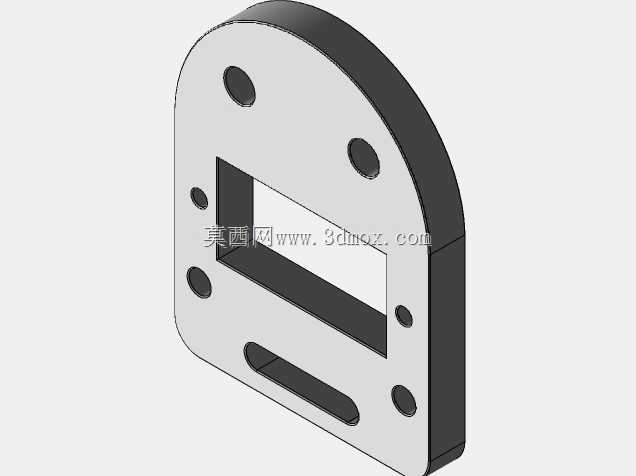
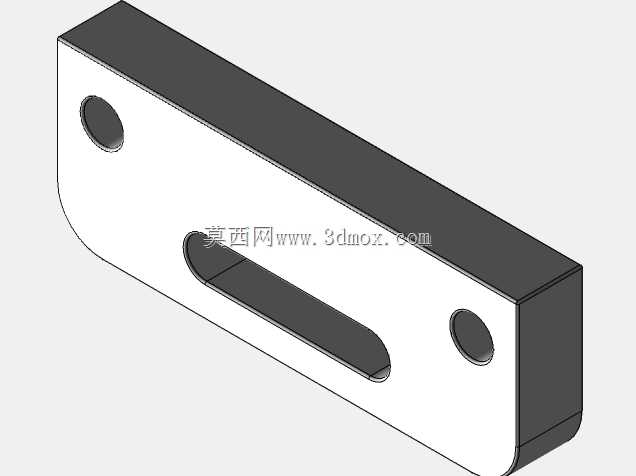
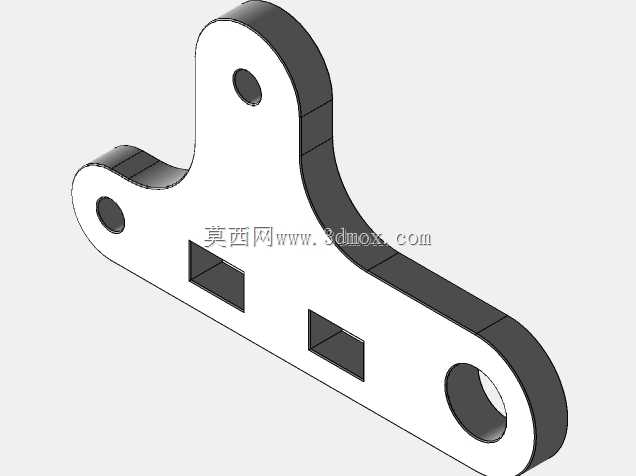
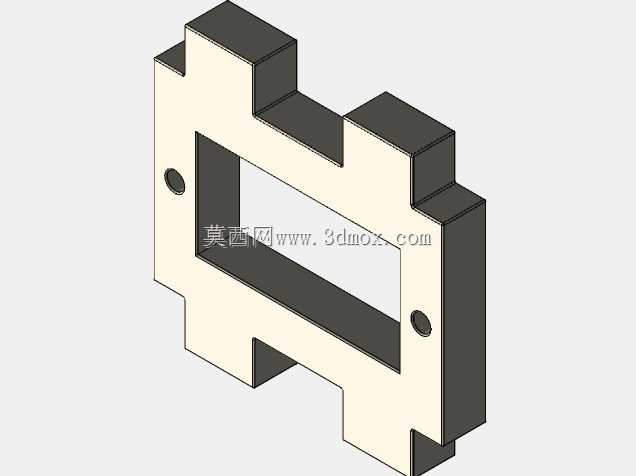
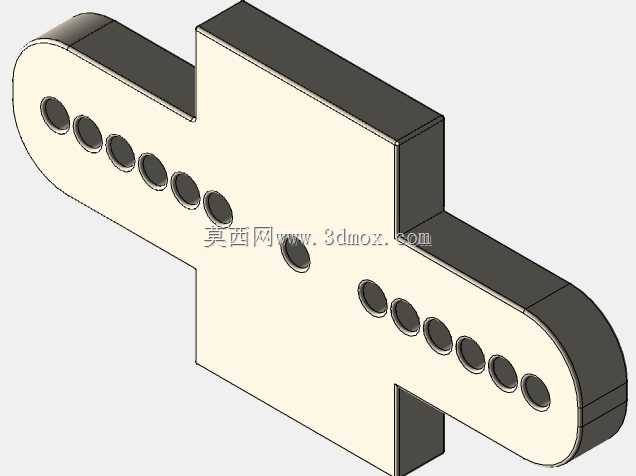
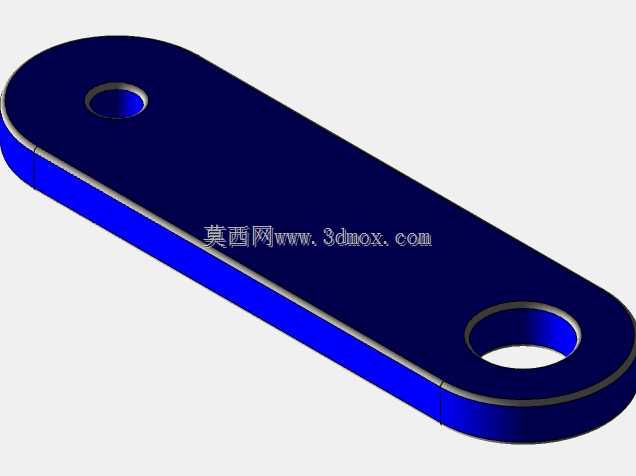
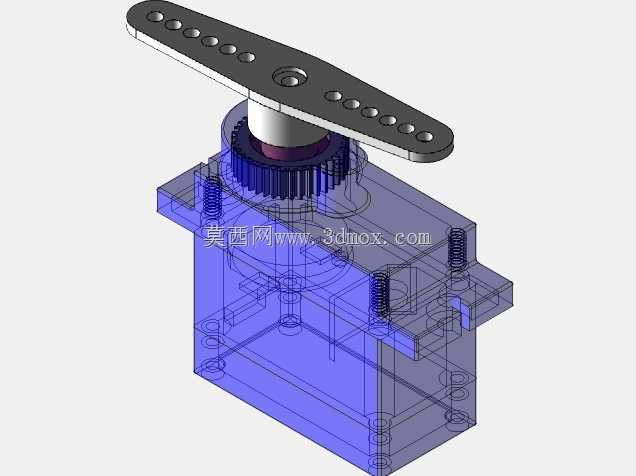
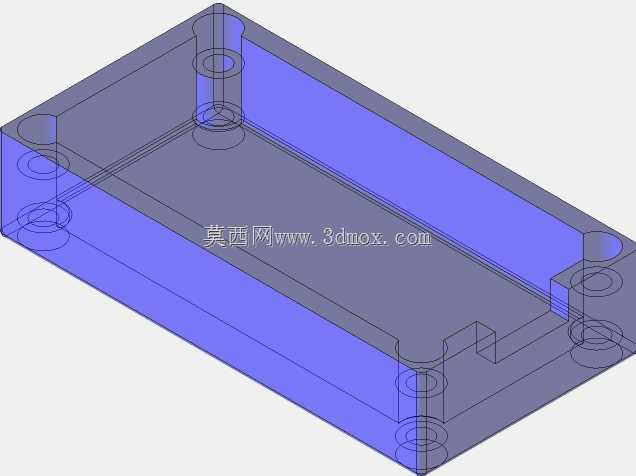
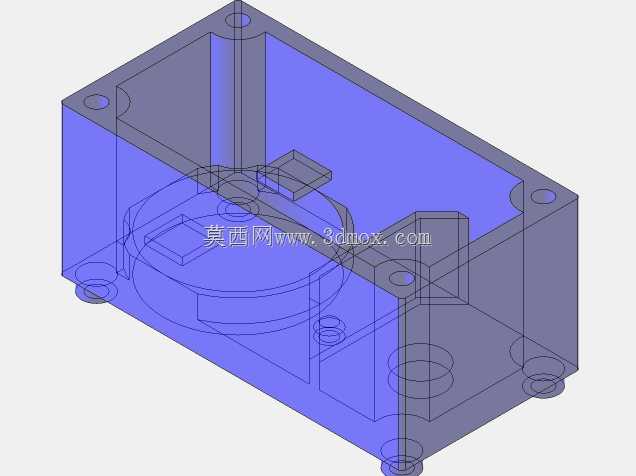
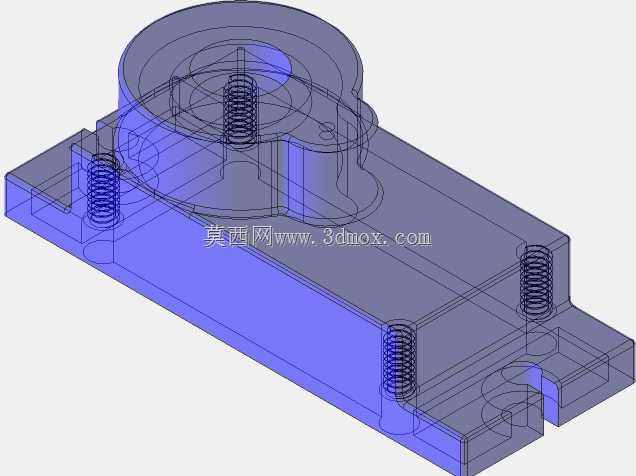
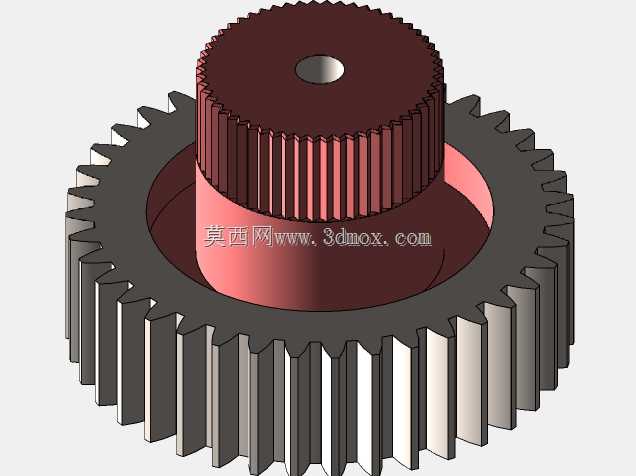

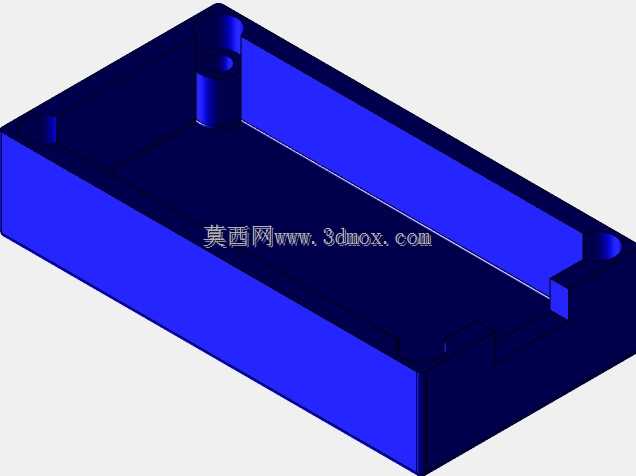
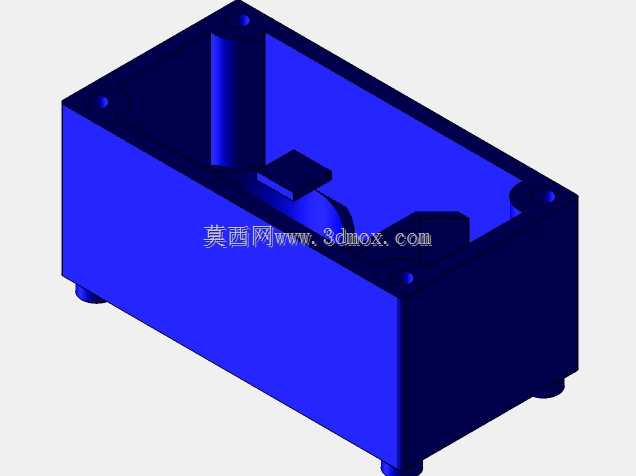
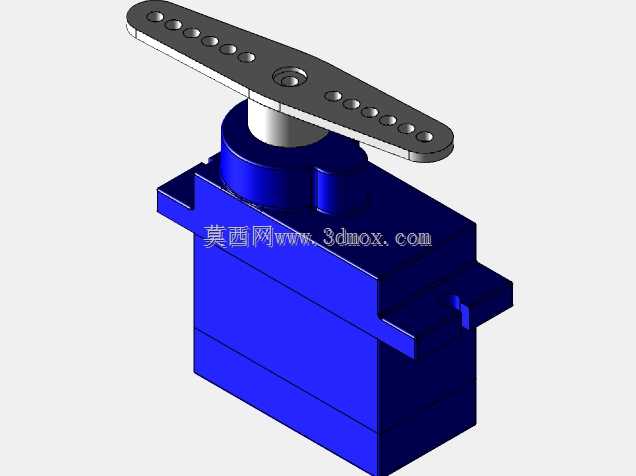
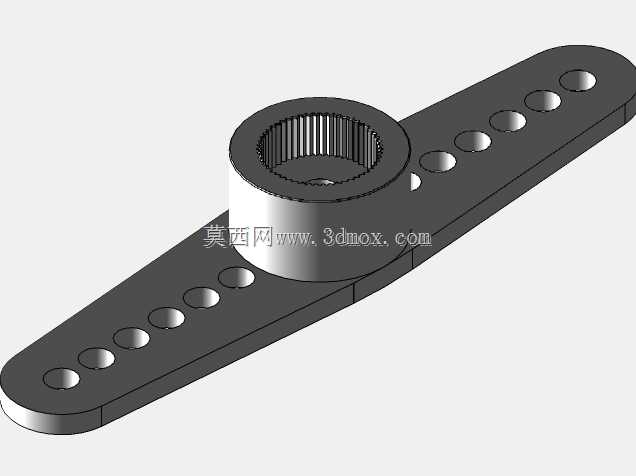
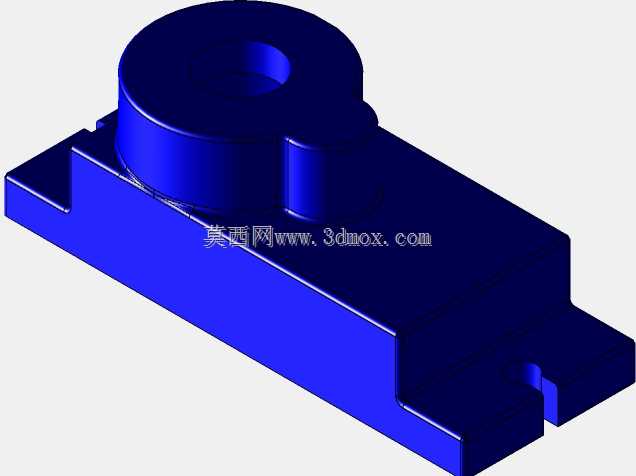

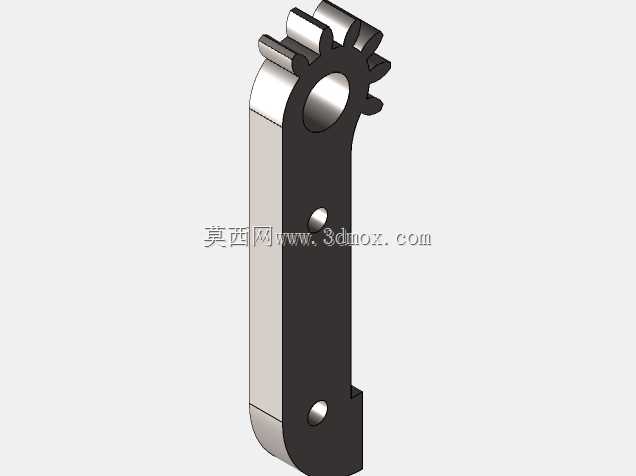

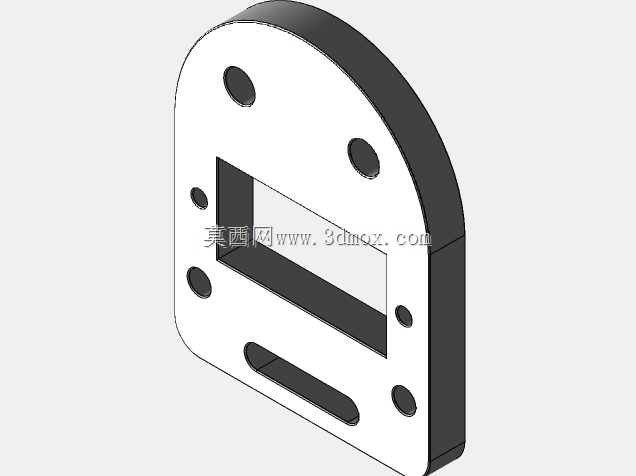
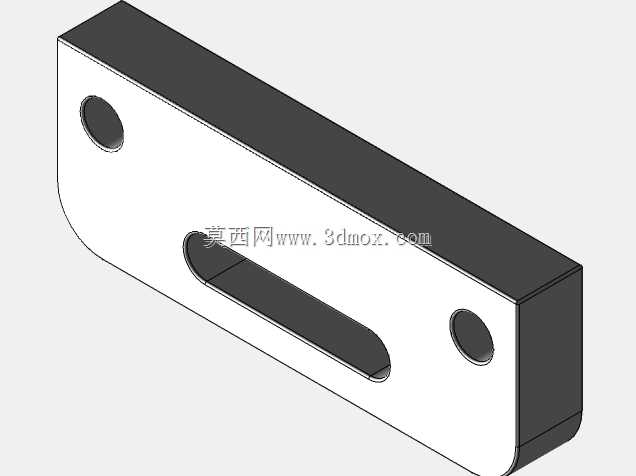
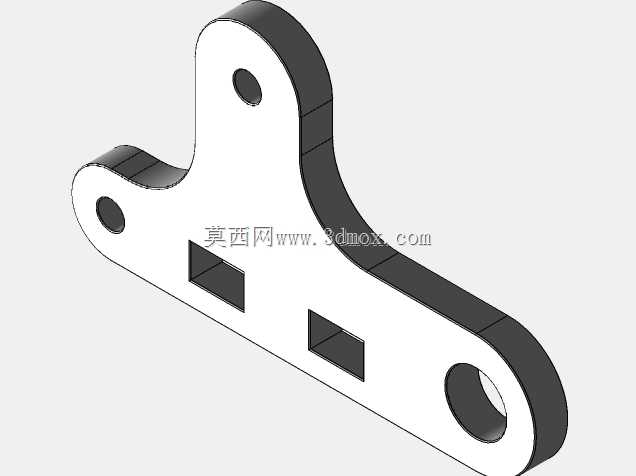
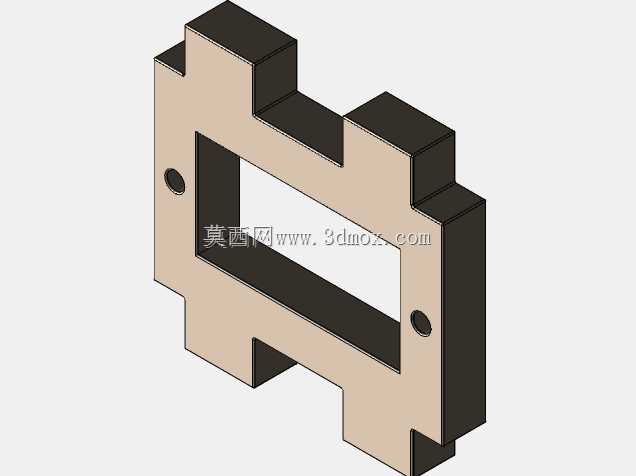
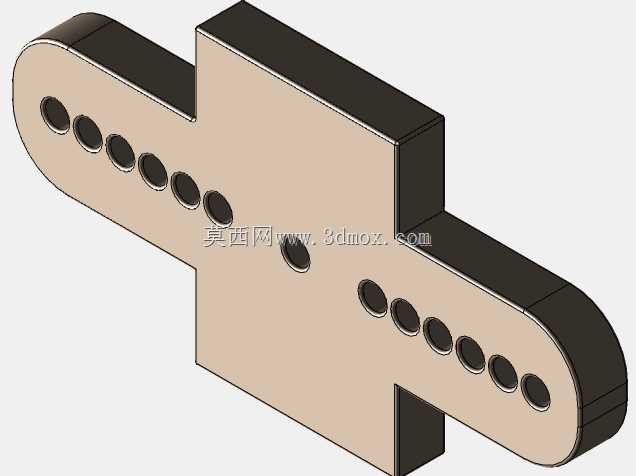
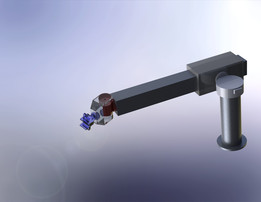
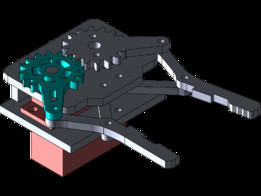
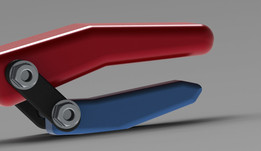
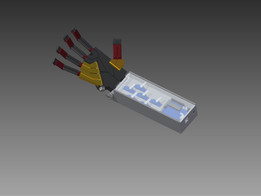
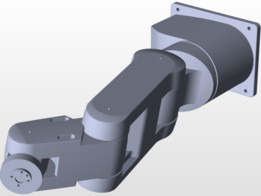
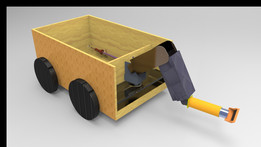
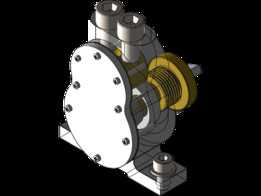
在机器人学中,末端执行器是机械臂末端的一种装置,设计用于与环境进行交互。这种装置的确切性质取决于该装置的应用机器人。结束效应器可以由夹持器或工具组成。当提到机器人抓取时,一般有四类机器人夹持器:1。冲击性的:通过直接冲击物体而实际抓握的下巴或爪子。侵入性:物理上穿透物体表面的针、针或刺(用于纺织品、碳纤维和玻璃纤维处理)。收敛力:施加在物体表面的吸引力(无论是通过真空、磁或电粘着)。连续性:需要直接接触才能发生粘附(如胶水、表面张力或冻结)。这里是一个带有2个手指的冲击式夹持器,由Solidworks 2016设计。此外,这两个伺服电机也在这里设计的简化格式,以帮助以后的模拟。我也包含了所有的parasolid文件,(.x\u t),以便Solidworks的其他版本的用户可以访问它。有关伺服电机的详细设计,请查看我的型号目录


- 模型大小 :14.35 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Parasolid,SOLIDWORKS,SOLIDWORKS,Parasolid,Parasolid,SOLIDWORKS,Rendering,Parasolid,Parasolid,Par