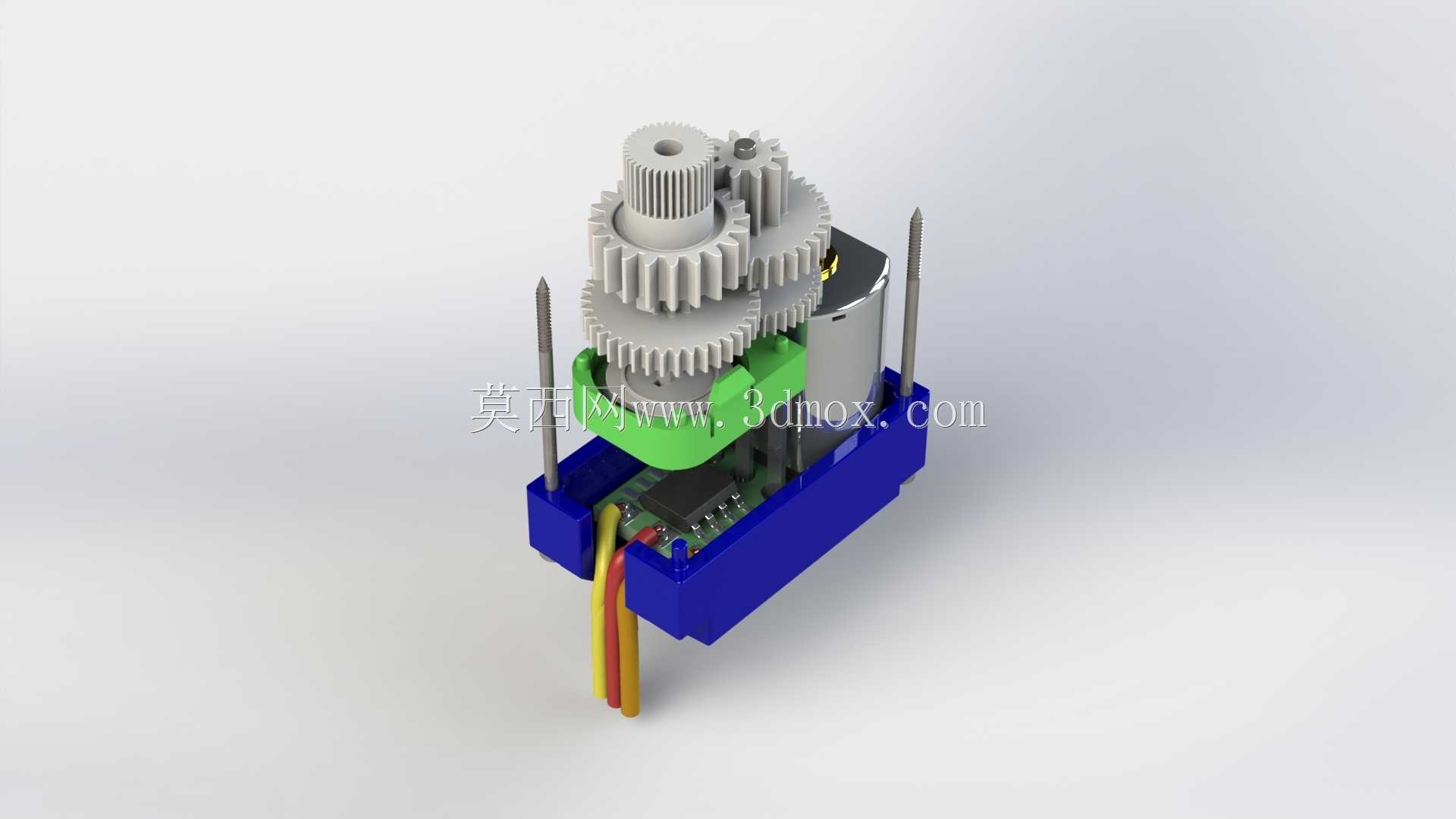
微型伺服电机SG90
伺服电机是最容易控制,因为他们已经有一个集成板内。他们不需要任何外部电机驱动器组件。我们只需将其插入Arduino板并用伺服库控制即可。他们可以用来创建一个四轮机器人转向机制。它们可用于控制精度低、重复性差的小型机器人手臂。例如,我们可以在它上面安装一个红外距离传感器,覆盖更大的区域,以便简单的机器人避开物体


- 模型大小 :4.98 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Parasolid,Rendering




伺服电机是最容易控制,因为他们已经有一个集成板内。他们不需要任何外部电机驱动器组件。我们只需将其插入Arduino板并用伺服库控制即可。他们可以用来创建一个四轮机器人转向机制。它们可用于控制精度低、重复性差的小型机器人手臂。例如,我们可以在它上面安装一个红外距离传感器,覆盖更大的区域,以便简单的机器人避开物体