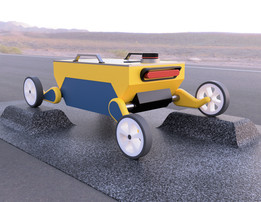
运送机器人-极端地形(爬楼梯)








这种运送机器人设计用于通过正常方式极难到达的地形。这可能包括受地震、山体滑坡、雪崩或任何其他灾害影响而必须交付专业物品的地方。为了实现这一点,模块包含带有四个独立附件的履带轮,如下图所示。这一概念的基本设计原则是,与车轮相比,轨道具有更大的表面积。这意味着重量分布和最大的接触保持,使其抓地力的情况下,一个正规的车轮可能会失败。设计的在机器人-3上渲染


- 模型大小 :48.52 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering