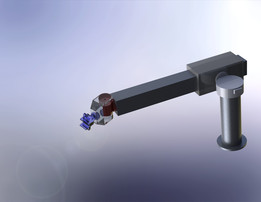
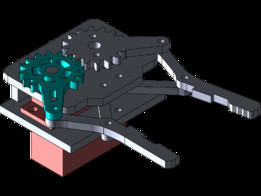
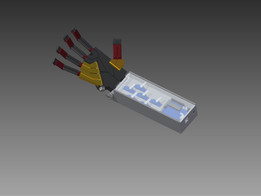
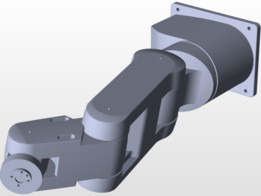
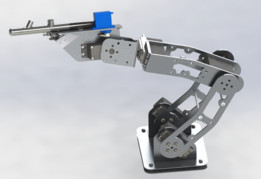
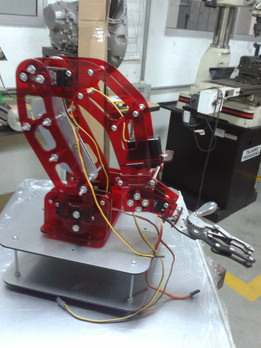
5自由度机械臂
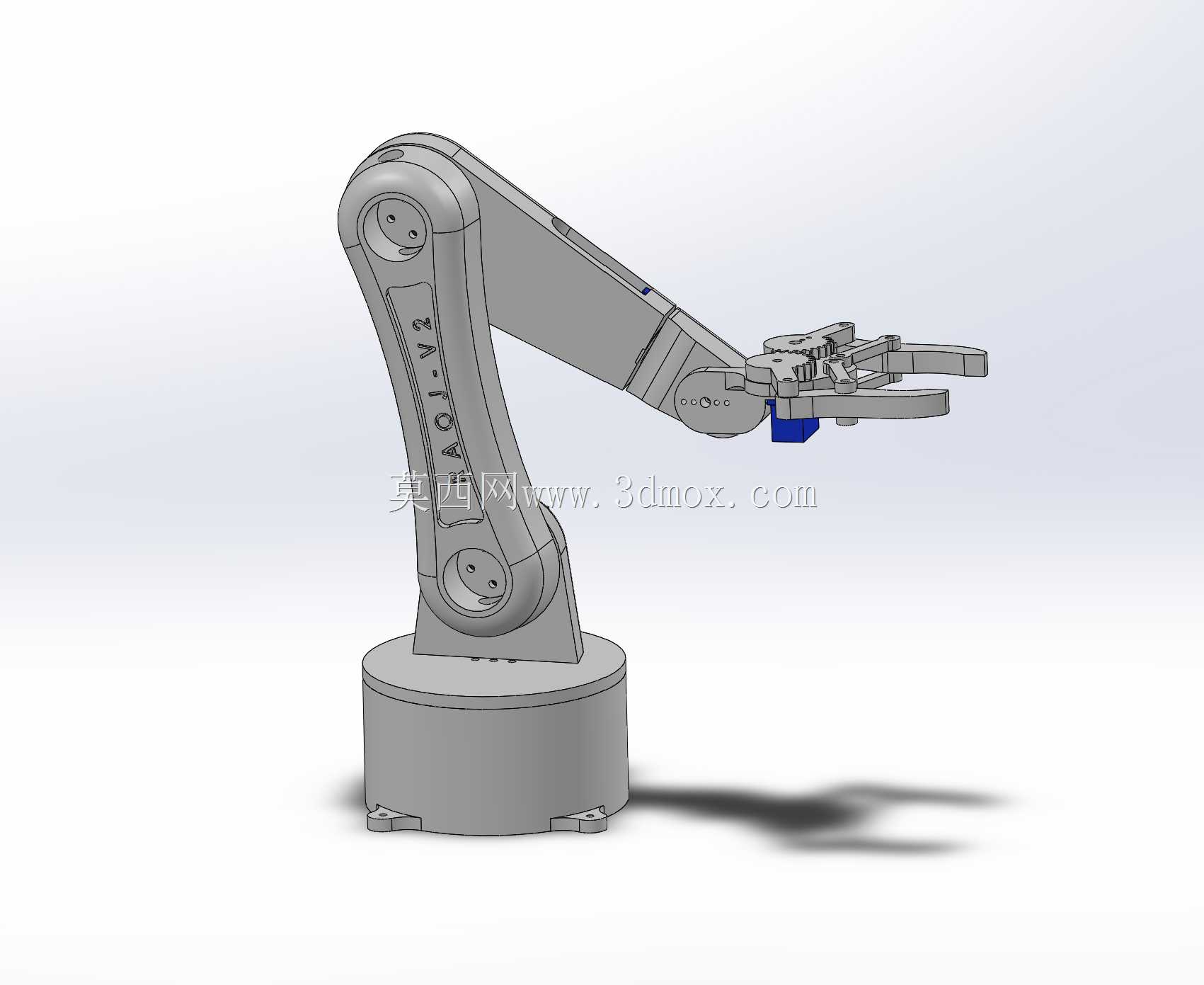
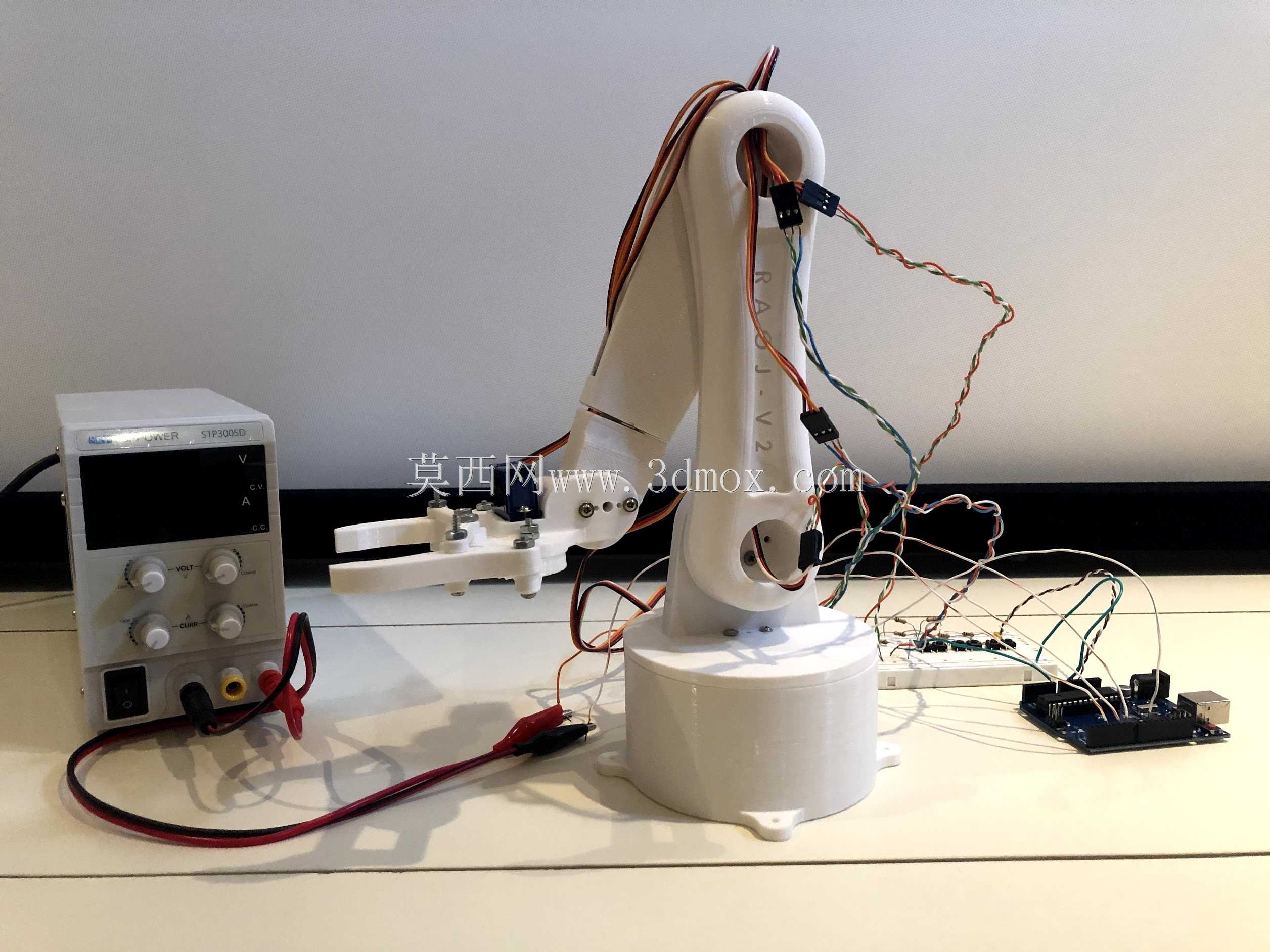


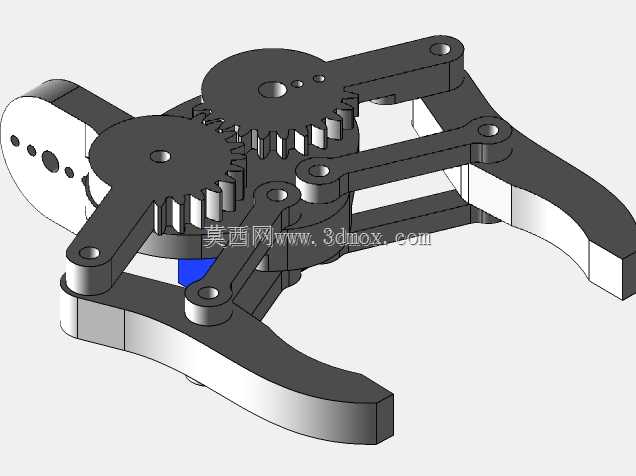



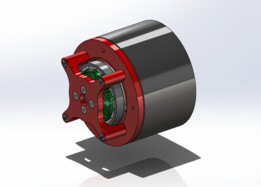
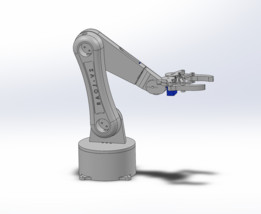
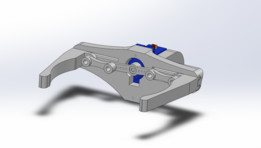
这是一个手势控制,三维打印,5自由度,桌面大小的机械臂。机械臂由三个标准伺服系统和两个微伺服系统驱动。手臂能够模仿人类手臂的运动,这是使用Python OpenCV库检测到的。伺服系统的PWM信号在Python中处理,并通过串行总线发送到Arduino Uno。以下是本产品的零件清单项目:-1x Arduino Uno-1 x MG996R标准伺服-2 x Futaba S3004标准伺服-3 x SG90微型伺服-1 x直流电源(或任何6V电源)-3D打印部件Spython和Arduino代码:https://github.com/JasonJZLiu/signature-Controlled-5-DOF-Robotic-Arm-using-Computer-Vision你知道吗


- 模型大小 :64.41 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,STL,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STL,SOLIDWORKS,STL,STL,STL,STL,STL,STL,STL,STL