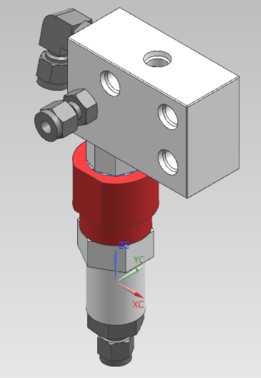
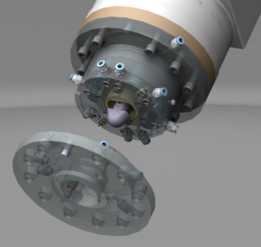
机器人换刀器(Trocador para)
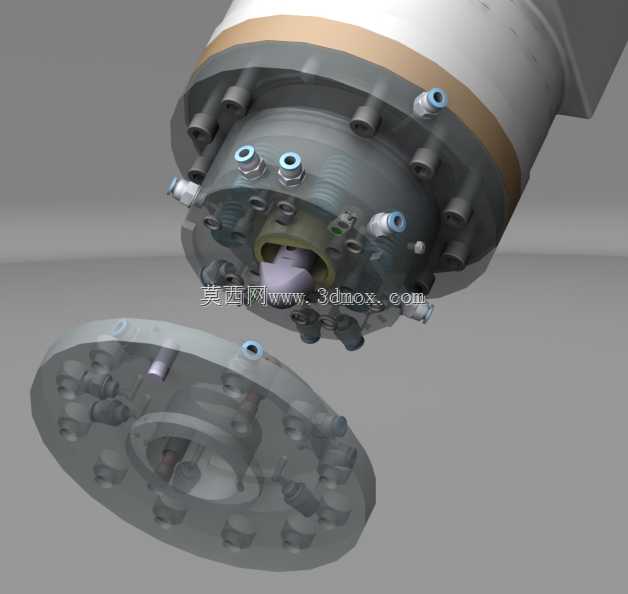
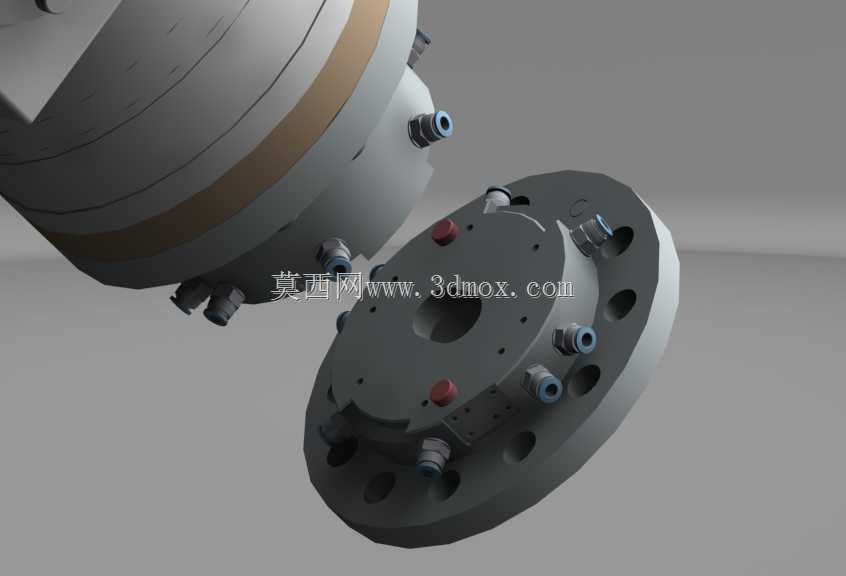
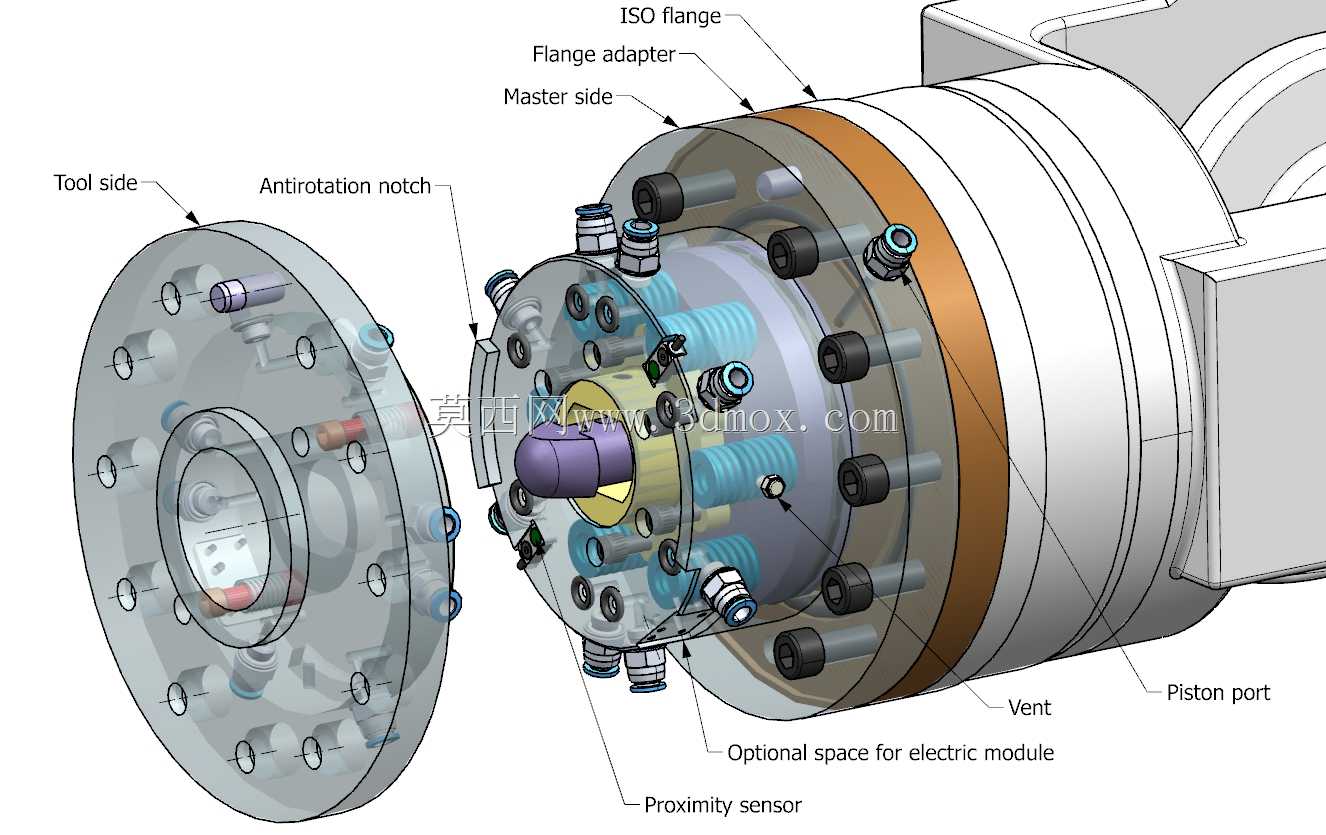
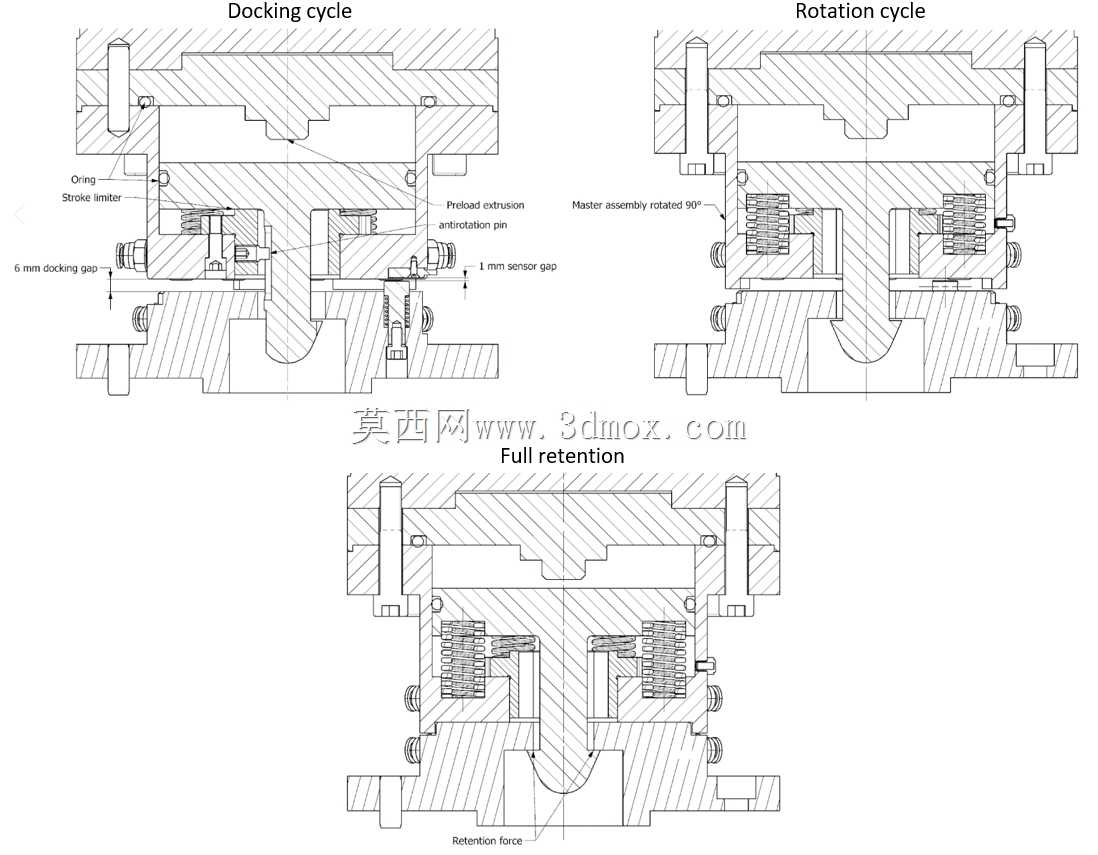

我对这个项目的动机是提供一个低成本的解决方案,快速更换机器人工具的生产线。手腕机器人的运动将主侧与刀具侧接合,压缩弹簧将组件牢牢固定。气动作用仅用于将活塞释放到工具板中(单动)。因此,该机构不依赖于气动或电信号来保持工具。它与双作用球/凸轮锁紧机构相比,由于其结构简单,因此成本较低活塞。它是为工业川崎机器人ZX200S设计的,最大有效载荷为200公斤,但它可以适应其他型号


- 模型大小 :12.34 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering