差速机器人手腕

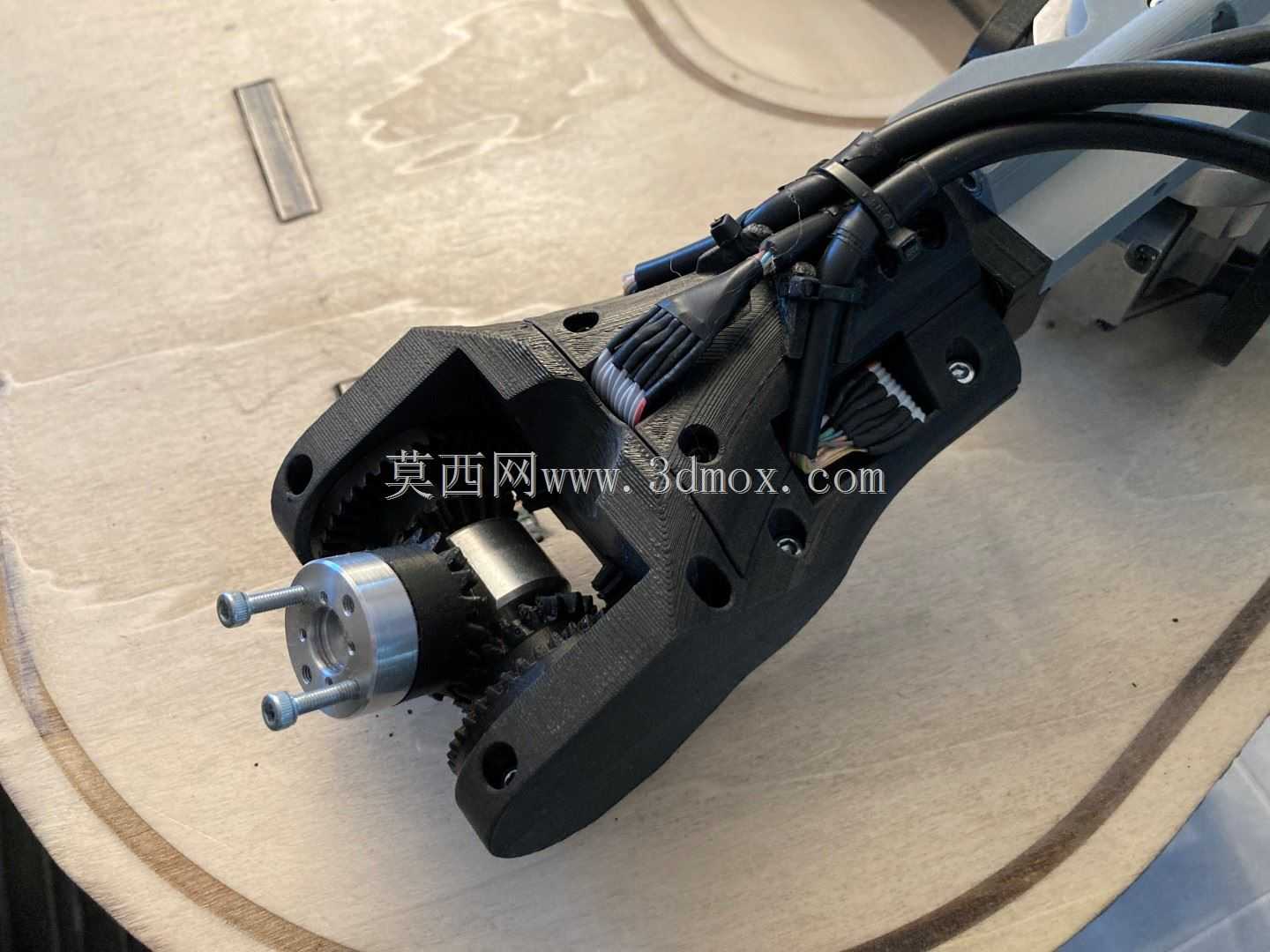





















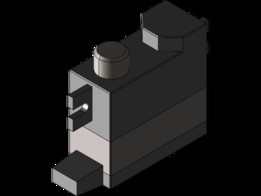
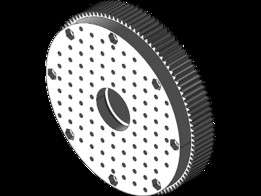
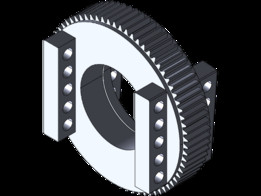
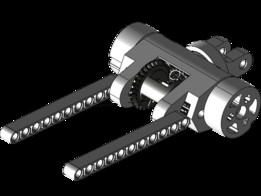
该模型是仿人机器人或机器人手臂的差动腕部。它有三个并发轴。电机为带编码器的Maxon电机,我设计它是为了尽可能减少加工零件,增加最大的塑性零件。每个塑料部件都是为3D打印机设计的,尽可能少的支持。为了装配它,只需要插入螺丝和螺母。我添加了一个step文件,以便与3D软件兼容。我做了两个,效果很好
标签:


- 模型大小 :18.74 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STEP / IGES,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWOR