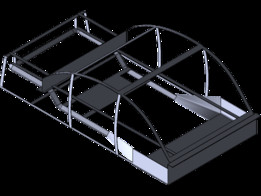
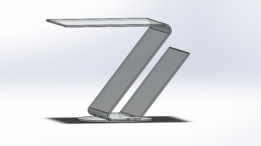
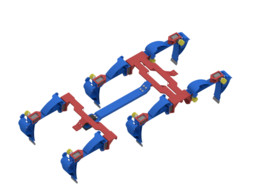
Flexoflow三维打印机:柔性臂结构



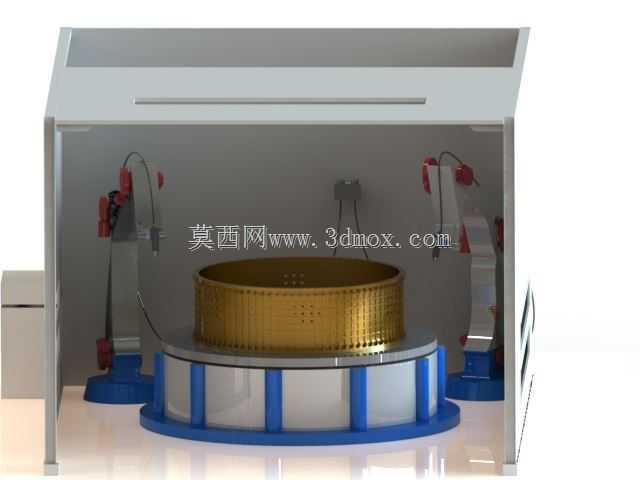





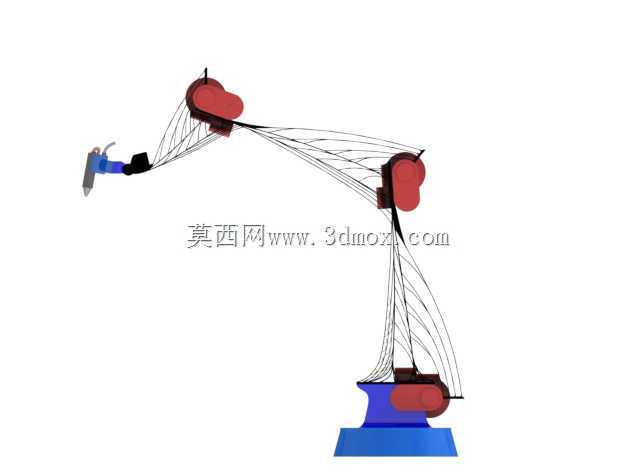

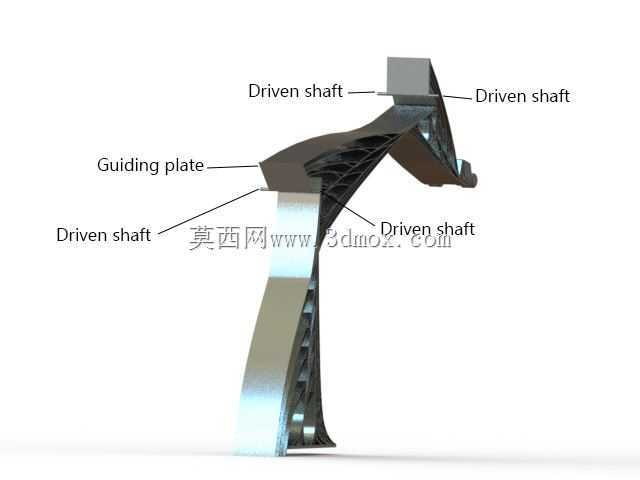
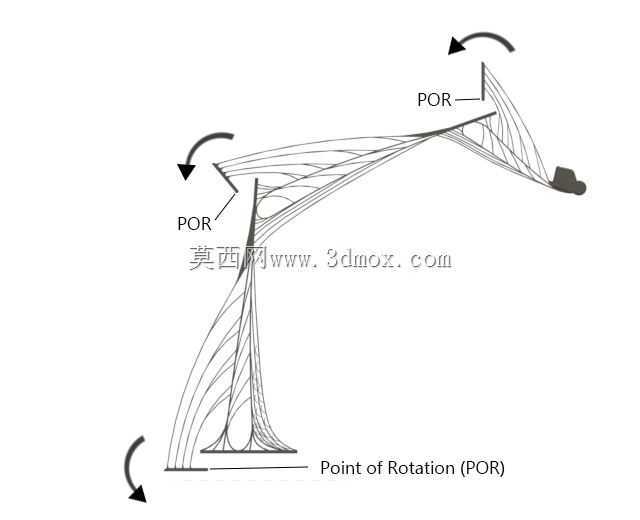


全功能和测试的三维打印模型,这一概念是可在FlexBot:三维打印机器人手臂flexoflow三维打印机是由灵活的几何结构。这台打印机的设计灵感来自密歇根大学的施赖达尔・科塔博士和美国宇航局的柔性翼飞机,整个3d打印机的手臂仅仅由一个部分组成。这样就不需要摩擦接头、联轴器和铰链。这座建筑由三台电动机操作。这些电机将“导板”扭成一定角度,推拉“主叶片”供送料嘴/加工头到达二维空间的物料沉积点,电机的转矩通过齿轮和蜗轮传递到“导板”上。扭矩传递的蜗轮装置有助于将结构保持在一定的位置。该结构可在导板上施加反向扭矩。这将通过蜗轮机构来防止。3d打印机的底座为旋转式,即底座应旋转360度。这提供了三度打印的通道。Flexoflow 3D打印机与传统3D打印机相比有几个优点。1.由于叶状结构,3D打印机的重量大大减少。2.操作打印机所需的功率将减少,因为导板的微小偏差足以将喷嘴带到任何位置平面3.无机械接头;这样可以减少磨损的机会。因此,整体维护将减少。4.柔性几何结构始终以均匀分布应力的方式制造。因此,不会有更高的应力集中或断裂点的零件。5.这种类型的3d打印机的制造可以很容易地通过一次性使用附加制造方法完成。提交的组件包括控制单元、动力单元、混合物、3d打印臂、两个喷嘴、软管、旋转底座、,故事背景:当我看到比赛时,我首先想到的是制作一台只有一个结构的3d打印机。我知道科塔教授所做的工作,但我不确定是否会使用同样的方法。我看着树,意识到它有一个非常稳定的结构。我家前面有一棵树,它的一根树枝直接连在树干上。树枝在强风中能灵活地接触地面,然后它会缩回到原来的位置。那件事一直萦绕在我的脑海里。我知道我可以在机器上做类似的东西。我做了一些5-7个纸模型,然后我得到了这个最终设计


- 模型大小 :14.98 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,Other,Rendering,Other,Other,Rendering