拖车

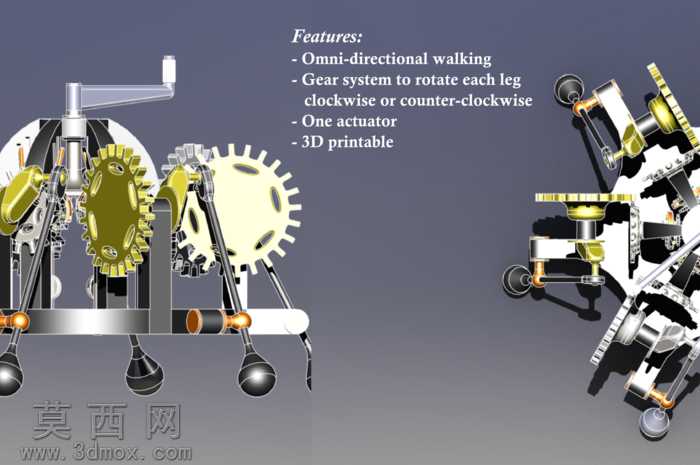
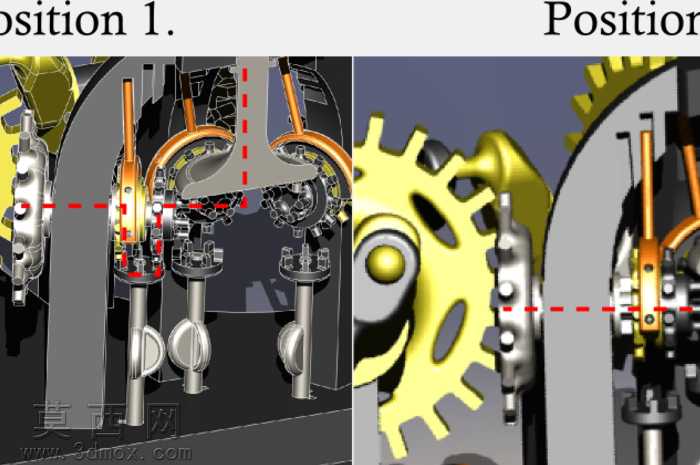
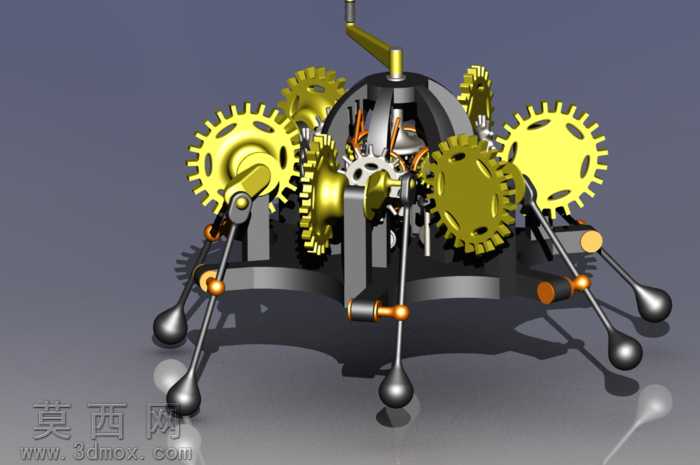

这项工作被有关 hexapedal 机器人,可以旋转每个腿顺时针/计数器-顺时针旋转,并因而在每个方向步行通过选择不同的双腿,推/拉。
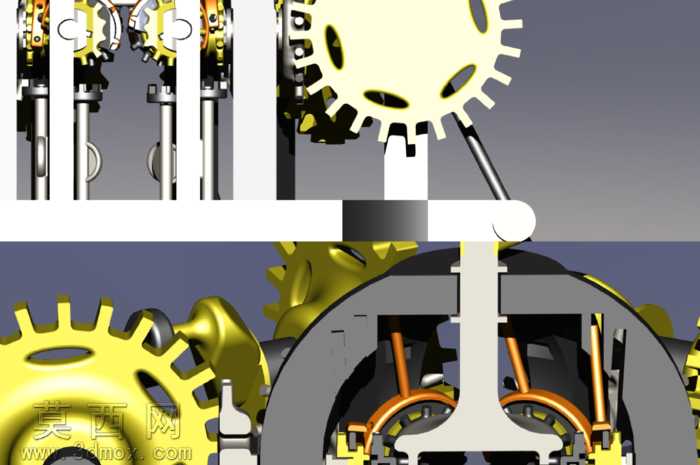
它被设计为 3D 打印的高精度 Stratasys 打印机,允许约 0.15 毫米的垂直步: 与足够的空间来避免在印刷过程中不受欢迎的铸件简化齿轮和关节。
这种设计提供了棱柱形、 圆柱形和球形接头和一个齿轮系统,将在创建自组装、 功能机制中显示 3D 印刷的巨大潜力。
标签:


- 模型大小 :76.06 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :